107031-33-EN FR26 GLO 1101 Printed in France
19
3.4.4.1
Sample Calculation:
Point-of-operation safeguarding
Country: USA
Application: Robot System
Protection: Point-of-operation safeguarding (load station)
Formula: Ds
≥≥≥≥
K x (Ts + Tc + Tr) + Dpf
•
K = 63 in/s minimum
•
Tr = Either 14,5 ms or 29,5 ms:
14,5 ms (FF-SYA30080Q2) when connecting the light
curtain’s control reliable solid state outputs directly to the
machine control
OR
29,5 ms (14,5 ms + 15 ms FF-SRS59392 module) if relay
contacts are needed to connect to the machine control
•
Ts + Tc = 200 ms (robot and clamp stop time; including
response time of all interconnecting components, etc.)
•
Hi = 20 in (no access below 20 in due to load station table)
Hu = 53 in (Reach thru for personnel)
=> Dpf = 3.08 in (ANSI R15.06) [FF-SYA30]
If Tr = 14,5 ms
:
Ds = 63 in/s x (0,0145 s + 0,200 s) + 3.08 in
Ds
=
16,59 in
minimum to the point-of-operation hazard
If Tr = 29,5 ms
:
Ds = 63 in/s x (0,0295 s + 0,200 s) + 3.08 in
Ds
=
17.54 in
minimum to the point-of-operation hazard
3.4.4.2
Sample Calculation:
Perimeter safeguarding (Access Detection)
Country: USA
Application: Robot System
Protection: Perimeter safeguarding (detecting entrance or
access to an area, such as the safeguarded space)
Formula: Ds
≥≥≥≥
K x (Ts + Tc + Tr) + Dpf
•
K = 63 in/s minimum
•
Tr = Either 11,5 ms or 26,5 ms
11,5 ms (FF-SYA03400Q2 or FF-SYA04300Q2) when
connecting the multi-beam’s control reliable solid state
outputs directly to the machine control
OR
26,5 ms (11,5 ms + 15 ms module FF-SRS59392) if
relay contacts are needed to connect to the machine
control
•
Ts + Tc = 350 ms (
robot system
stop time, including
response time of all interconnecting components, such as
relays, solenoids, brakes, etc.)
•
Hi = 10 in
Hu = 38 in (Reach over of upper torso)
=> Dpf= 48 in (per ANSI R15.06)
If Tr = 11,5 ms:
Ds = 63 in/s x (0,0115 s + 0,350 s) + 48 in
Ds = 70.77 in
minimum to the closest hazard
If Tr = 26,5 ms:
Ds = 63 in/s x (0,0265 s + 0,350 s) + 48 in
Ds = 71.72 in
minimum to the closest hazard
3.5
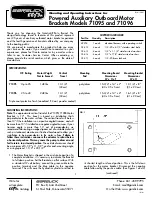
How to Calculate Minimum Distance Considering Reflective Surfaces
REFLECTIVE SURFACES
•
To prevent two optical paths to the receiver, install the FF-SYA light curtains so there are no reflective surfaces within the
beam angles of the emitter and receiver.
•
Calculate reflective minimum distance using formula D= L(tan 2,5
°
), where
•
D is the minimum distance to reflective surface (always greater than 131 mm or 5.16 in)
•
L is the installed scanning range
Failure to comply with these instructions could result in death or serious injury.
Reflective surfaces near the sensing field can cause reflection of the sensing beams and result in two optical paths to the
receiver. The light curtain must be installed so there are no reflective surfaces within the beam angles of the emitter and
receiver. Figure 3-2 illustrates the beam angles.
Calculate the reflective minimum distance using the following formula:
•
D = 131 mm, for scanning distances between 0 and 3 m
•
D = L x tan 2,5
°
, for scanning distances greater than 3 m
•
D = Minimum distance to reflective surface (always greater than 131 mm or 5.16 in)
•
L = Installed scanning range
The emitter and receiver must have the same protected height and resolution. The emitter and receiver must be mounted at the
same height and aligned with each other.
Figure 3-2 Distance from Reflective Surfaces
E
R
2.5°
2.5°
2.5°
2.5°
L
D
Reflective surface
Emitter
Receiver
F
SYA1
7