


















LSA-10A-30-D-130 Technical Document
-4-
Chapter 1 Overview of LSA Series
The LSA and PSM series are Galvanometer Scanner systems that can optically scan with quick response
and high accuracy. Main characteristics of the systems
based on compact motor technology and
independently developed optical sensor technology, so the following applications are available:
measurement devices, laser processing equipment, laser displays, shutters, laser markers, etc.
1-1 Main Characteristics
♦
Quick Response and High Torque/Inertia Ratio
The motor component of the scanner is a moving magnet system and the stator utilizes a core and coil
configuration. This allows for a
heavy load/quick response
. The LSA and PSM devices are available
for a wide torque range applications.
♦
Low Heat Generation (Low Drift)
The temperature rise caused by the quick-response/high-frequency scanner operation is minimal and
results in
low drift
.
♦
High Accuracy/Environmentally Strong Scanner
The sensor component of the scanner can position with high accuracy (system positioning repeatability:
within ±
5μrad [1”]) as it utilizes an optical potentiometer independently developed by our company.
In addition, this sensor is strong against external electrical noise (increased S/N ratio) and is not affected
by the exterior atmospheric environment.
♦
Adjustable Functions with Broad Ranging Applications
The driver maximizes the capacity of the combined scanner and possesses numerous adjustment
functions to adjust to customers’ usage conditions.
In addition, we will adjust the drive if necessary based on the study of customer’s operating conditions and
specifications.
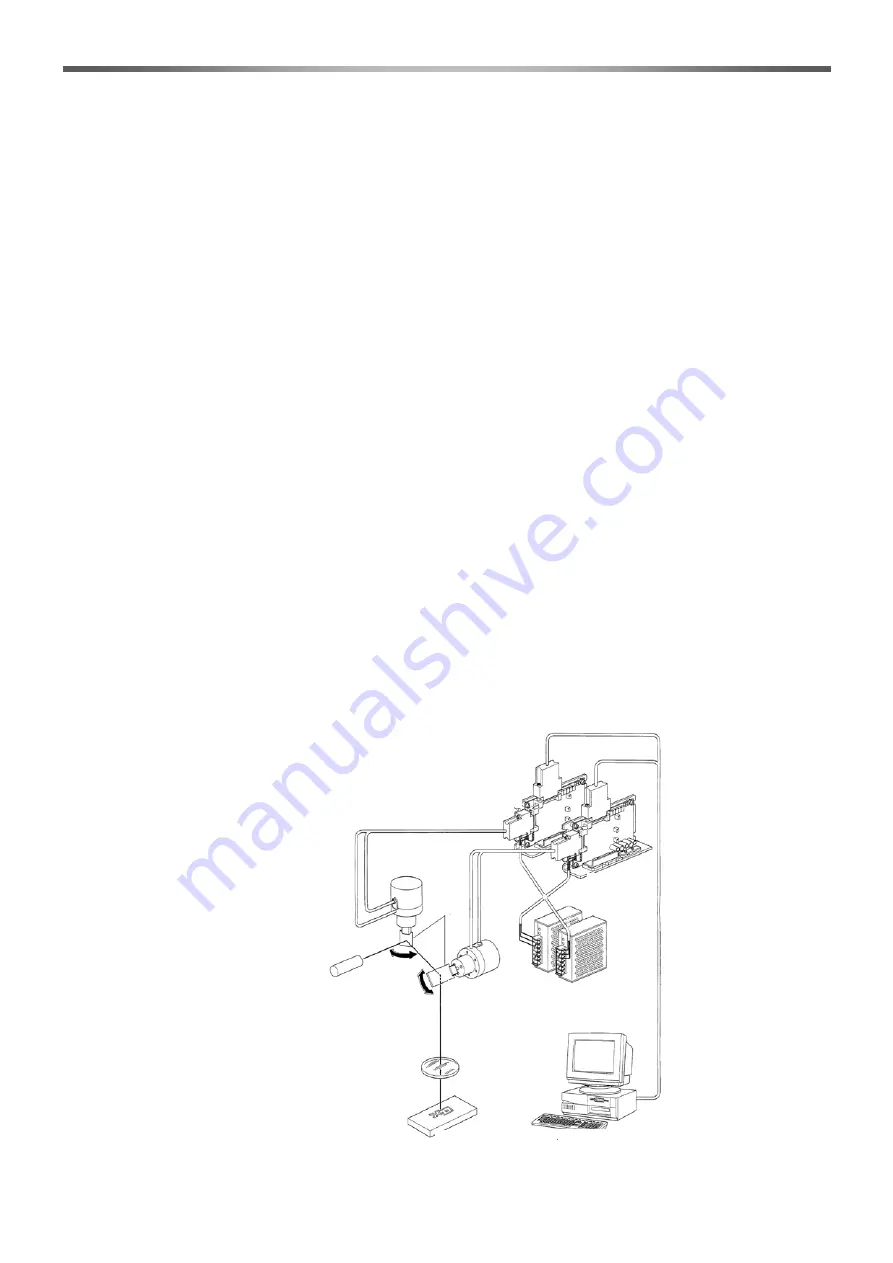
1-2 Example of Equipment Configuration
Reference Example: Summary of Laser Marker System
Y Axis Driver
X Axis Driver
Y Axis LSA
X Axis LSA
* Laser Oscillator
*DC Power Source
* f
θ
Lens
* Target workpiece
The items marked with “*” should
be prepared by the client
* Miror
*External analogue
command signal







































































