





























Chapter 7
Parameter details
-
-
46
Position loop gain
●
Function
This parameter specifies the gain of the position loop. And it determines the value based on the
frictional torque and rigidity of the machine.
High setting
The position error is small, and high tracking performance to commands is obtained.
If the setting is too high, the servo system will be unstable and hunting may easily
occur; it should be decreased so that no hunting can occur.
Low setting
If the setting is too low, a problem may occur; for example, the tracking performance
to commands may be poor, or position precision may not be obtained.
When no hunting occurs and neither overshoot nor undershoot occurs, set the maximum gain.
●
Setting
Unit
Lower limit
Upper limit
Default
s
-1
10
9999
Note
Note: The actual setting varies with the DC servo actuator model. When changing the value,
consider the defaults shown in Section 7-1, "Default parameters" as the standard
(guide setting).
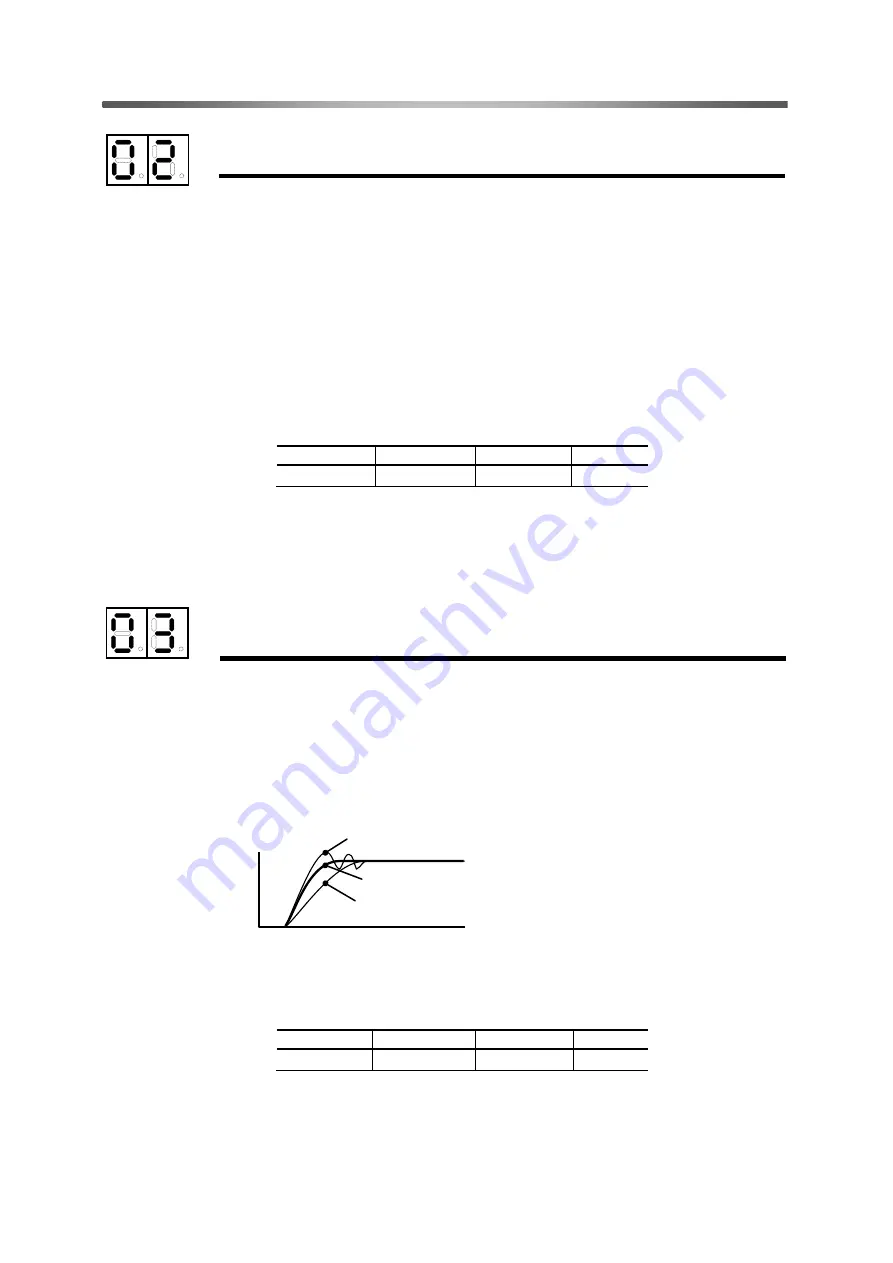
Speed loop proportional gain
●
Function
This parameter specifies the proportional gain of the speed loop. Determine the value based on the
moment of inertia, the frictional torque, and the rigidity of the machine.
High setting
If the setting is too high, the servo system will be unstable (hunting) and
overshoot will easily occur.
Low setting
If the setting is too low, the responsiveness and tracking performance will be poor.
When no hunting occurs and neither overshoot nor undershoot occurs, set the maximum gain.
●
Setting
Unit
Lower limit
Upper limit
Default
-
10
9999
Note
Note: The actual setting varies with the DC servo actuator model. When changing the value,
consider the defaults shown in “Section 7-1, Default parameters" as the standard
(guide setting).
Overshoot
Optimal
Undershoot
Speed
Time
Содержание HS-360 Series
Страница 6: ...DC servo driver HS 360 Series Memo...







































































