





























l
62
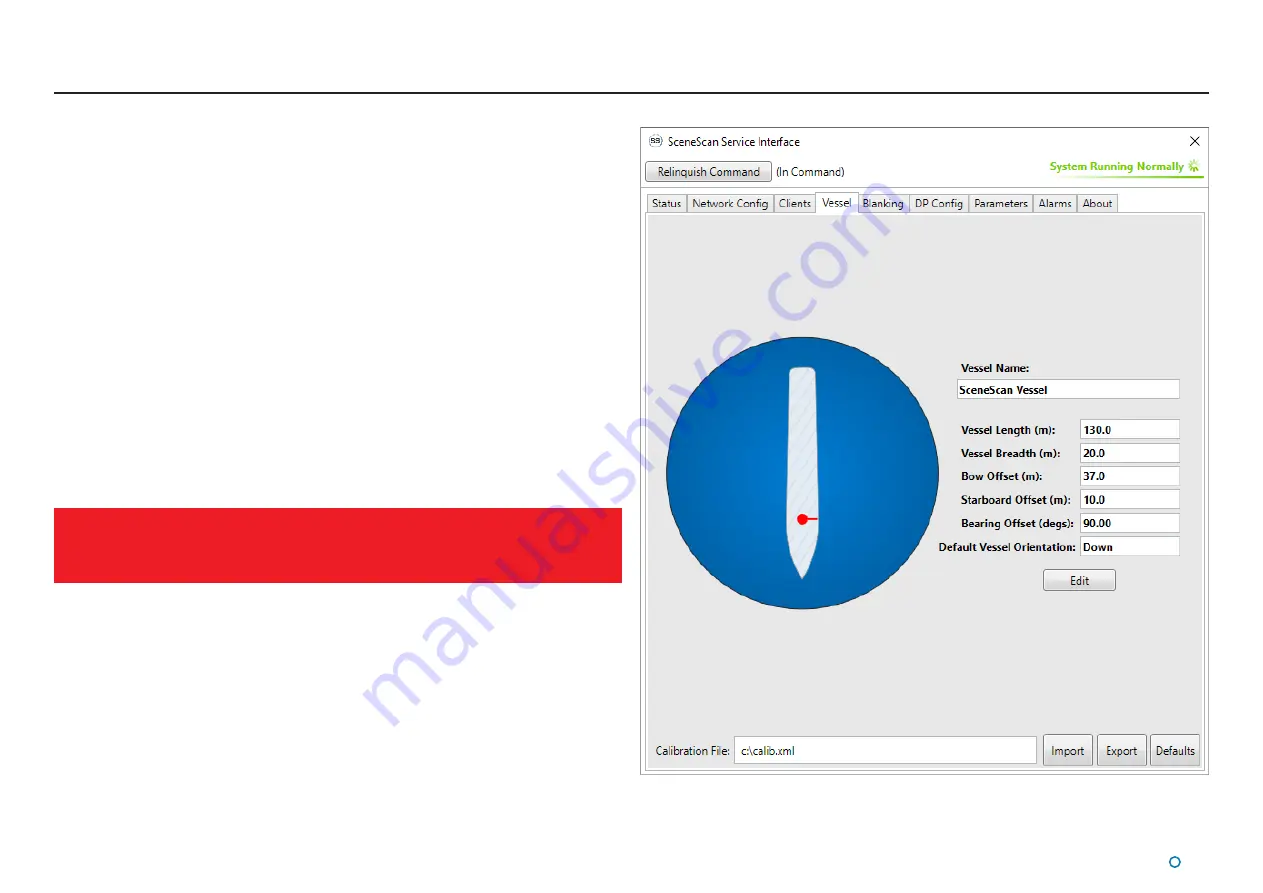
Vessel Parameters
The Vessel tab allows you to define the dimensions of the vessel outline on the BEV, the name
of the vessel and other items as follows:
•
Vessel Name: The name of your ship (displayed on the Dashboard).
•
Vessel Length: The distance from the bow to the stern of the vessel in metres.
•
Vessel Breadth: The width or beam of the vessel in metres.
•
Bow Offset: Distance from the centre of the SceneScan Sensor to the vessel’s bow, in
metres.
•
Starboard Offset: Distance from the centre of the SceneScan Sensor to the vessel’s
starboard side, in metres.
•
Bearing Offset: This should be 0° if the SceneScan Sensor is mounted exactly parallel
to the vessel’s centre-line running from bow to stern. If the Sensor is at an angle to the
centre-line, enter a Bearing Offset to compensate for this (see
Bearing Offset
on page
62).
•
Default Vessel Orientation: The default direction of the vessel bow as displayed on
the Bird’s Eye View of the Dashboard. Changing this setting rotates the whole BEV but
does not affect the data sent to the DP system. Note that this setting can be overridden
for the current Dashboard session via Advanced > Display Options > Layout > Vessel
Orientation, but the BEV reverts to the default orientation when the Dashboard is closed
and re-opened.
Modifying Vessel Calibration
In order to amend any of the above parameters:
1. Click on the Resume button if the Sensor is supended.
2. Click on the Take Command button if the SceneScan Service Interface is not already In
Command.
3. Ensure that no tracking is in progress.
4. On the Vessel tab, click on the Edit button.
5. Amend the Vessel Calibration as required.
6. Click on Apply to save the changes or on Cancel to discard.
It is very important that the vessel dimension parameters are set accurately as
laser pulse data returned from within the vessel area is ignored by the positioning
algorithm; it is effectively a vessel shaped blanking zone.
Содержание 20-0253
Страница 81: ......