





























Section 2 System Overview
1
st
Ed Nov 2018
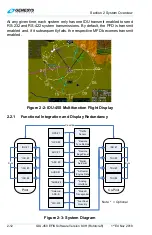
IDU-450 EFIS Software Version 8.0H (Rotorcraft)
2-19
3) Serial protocol converters
4) Video
format
converters
Data storage is sufficiently sized to hold world terrain, navigation, and
obstruction databases. Because the receive ports are connected to the
digital sensor modules in parallel, each IDU is independent from all others.
2.3.1 Data
Source
Monitors
IDUs continuously monitor the ADC, AHRS, and GPS sensors to detect
disagreements:
1) Airspeed
2) Altitude
3) Attitude
4) Barometric setting (pilot vs. co-
pilot sides)
5) GPS position, track, and
groundspeed
6) Heading
7) Localizer and glideslope
deviations
8) Radar
altitude
2.3.2 IDU Intra-System Communications
Communication between IDUs installed on the same side is referred to as
intra-system communications. In a dual system (pilot and co-pilot)
configuration, the crosslink side-to-side communications is referred to as
inter-system communications. IDUs on a system side (pilot side and co-
pilot side individually) monitor each other using intra-system
communications and perform the following checks:
1) Intra-system
communications freshness
2) Screen
counter
incrementing (i.e., screen
not frozen)
3) Airspeed
agreement
4) Altitude
agreement
5) Attitude
agreement
6) Barometric
setting
agreement
7) GPS position, track, and
groundspeed agreement
8) Heading
agreement
9) Localizer and glideslope
deviation agreement
10) Radar altitude agreement
2.3.3 GPS Aiding Limitation
To prevent gyro drift in the roll attitude solution, continuous corrections to
roll attitude are made based upon speed, accelerations, and rates. The
preferred correction speed source is airspeed from the air data computer





















































