





























21
Position Control
Standard Positioning Sequences
1.) Enter the acceleration and the maximum
velocity (rpm)
AC50 [enter]
➔
Sets acceleration to 50 Rev/s
2
SP3000 [enter]
➔
Sets maximum velocity
to 3000 rpm
These values are set until they are changed or
the motor is turned off.
2.) Set Command Position
Either:
a.)
LA40000 [enter]
➔
Sets command position
to Absolute Position 40000
Or:
b.)
LR10000 [enter]
➔
Adds 10000 to the
current Command Position
3.) Start Positioning Sequence
M [enter]
➔
Depending upon the choice of
a.) or b.) from step 2.) the positioning
sequence will start from either 40000 or
current command po10000. The
motor will turn to this position with the
given acceleration and maximum velocity.
By repeating steps 2.) and 3.) one can set the
motor to rotate to other positions one after the
other.
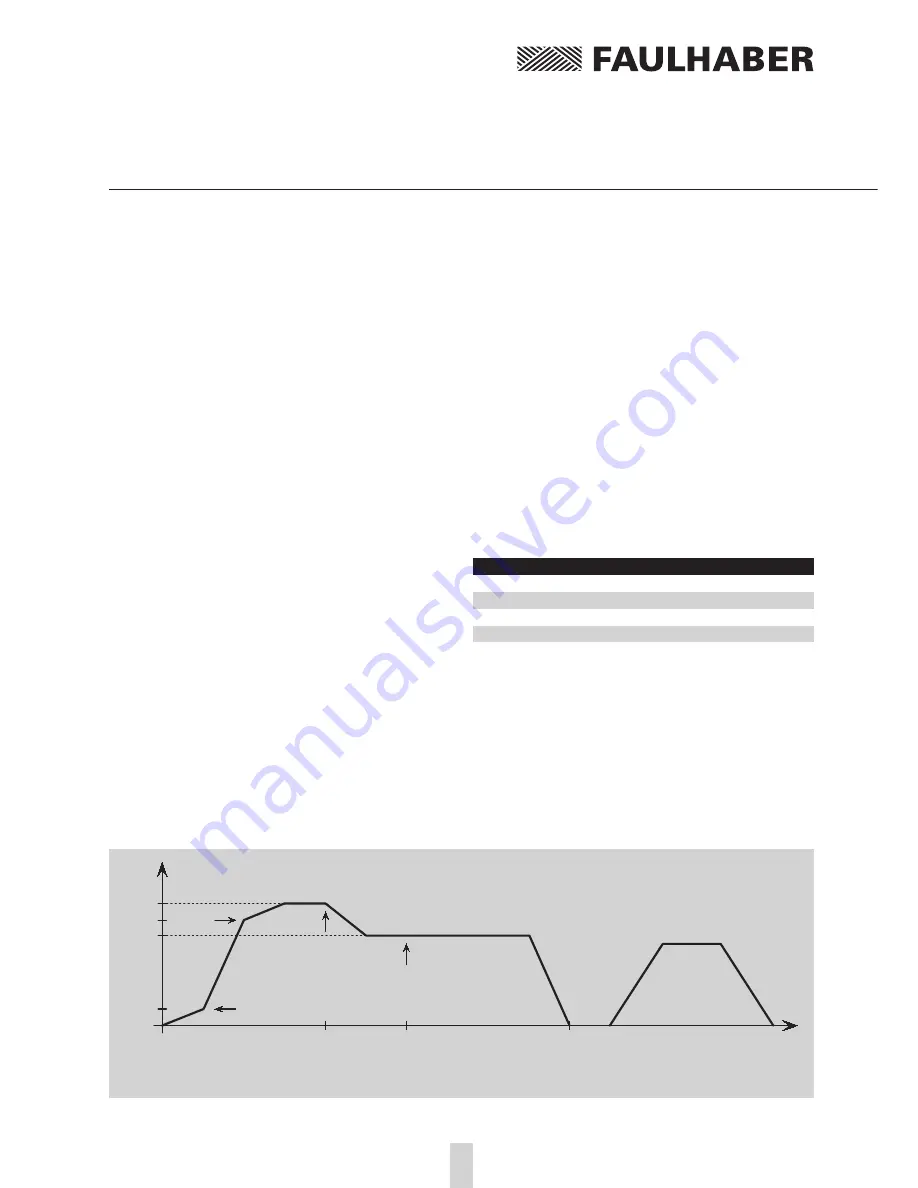
Combined Motion Profiles
Through well chosen values (Maximum Velocity,
Acceleration, end Position) entered during a
positioning sequence one can create complex
motion profiles. After any values have been
changed during a positioning sequence a
new motion-start (the M command) must be
initiated. The commands NP (notify position)
and NV (notify velocity) can be used to aid in
controlling the sequence.
Velocity
Time
SP1
V2
V1
SP2
POS1
POS2
POS3
a.)
b.)
c.)
d.)
AC1
AC2
AC3
AC4
Trapezoidal
Profile
Combined Motion Profile
Diagram 7: Combined motion profile in comparison to a trapezoidal profile
Sequence
(corresponding command sequences
after the notify requirements have been met)
Start:
a.)
b.)
c.)
d.)
LA[POS3]
AC[AC2]
AC[AC1]
SP[SP2]
AC[AC4]
AC[AC1]
NV[V2]
NP[POS1]
AC[AC3]
NP[POS3]
SP[SP1]
M
M
NP[POS2]
M
M
M
Setting the Digital Filter
The digital filter settings in Positioning Mode
can also be optimized just as in Speed Control
Mode (see above).
Содержание MCDC2805 series
Страница 58: ...58 Notes ...
Страница 59: ...59 Notes ...