





























Setup & Operation 3. Environments and Installation
38
VT Rev.1
3.9 Checking the Basic Orientation
After parts have been replaced (motors, reduction gear units, belts, etc.), the Manipulator
cannot operate properly because a gap exists between the origin positions stored in each
motor and these stored in the Controller. The process to compensate the position gap is
called “Calibration”.
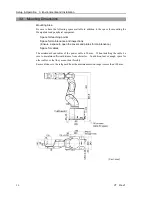
At the time of shipment, the basic orientation of the Manipulator shown below is set as the
origin position.
After installing the Manipulator and setup the operating environment, move the
Manipulator to the origin position and check if it moves to the basic orientation properly.
To make the Manipulator move to the origin position, select [Tools]-[Robot Manager] -
[Control Panel] and click <Home>.
If the gap still exists and the Manipulator cannot be in the basic orientation after the
calibration, please contact us.
Содержание VT Series
Страница 1: ...6 Axis Robots VT series MANIPULATOR MANUAL Rev 1 EM18YR3817F ...
Страница 2: ...MANIPULATOR MANUAL VT series Rev 1 ...
Страница 8: ...vi VT Rev 1 ...
Страница 16: ...TABLE OF CONTENTS xiv VT Rev 1 ...
Страница 18: ......
Страница 31: ...Setup Operation 2 Specifications VT Rev 1 15 2 4 Outer Dimensions ...
Страница 32: ...Setup Operation 2 Specifications 16 VT Rev 1 Unit mm ...
Страница 33: ...Setup Operation 2 Specifications VT Rev 1 17 2 5 Standard Motion Range Unit mm ...
Страница 129: ...Maintenance This volume contains maintenance procedures with safety precautions for VT series Manipulators ...
Страница 130: ......
Страница 138: ...Maintenance 3 Manipulator Structure 122 VT Rev 1 3 Manipulator Structure ...































































