





























Chapter 5 Parameters 51
EV1000 Series General Purpose Variable Speed Drive User Manual
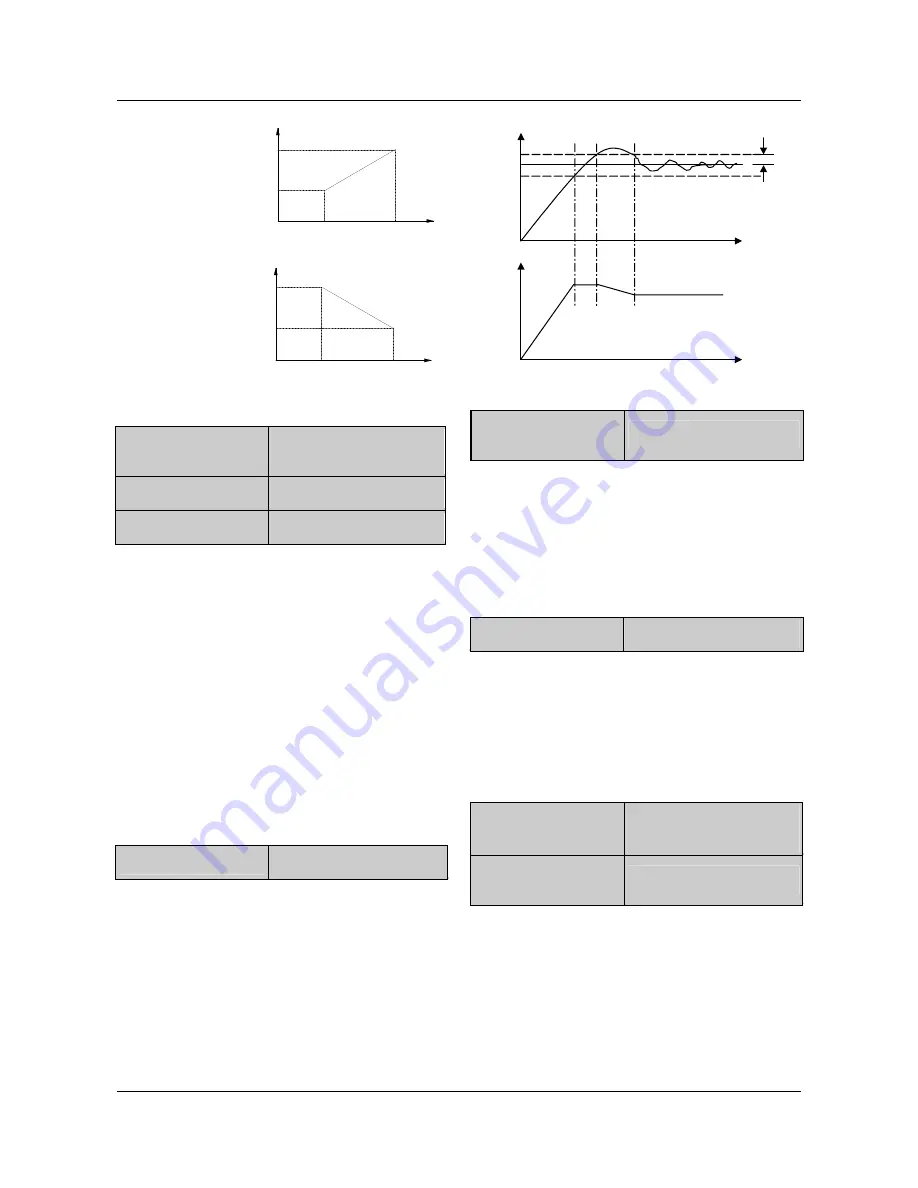
Feedback
direct
proportion
Feedback
Inverse
proportion
F5.11
F5.09
F5.10
F5.08
Feedback
Input
F5.09
F5.11
F5.10
F5.08
Feedback
Input
Fig. 5-33 Relation of Input and Feedback
F5.12 Proportional gain
Kp
Range: 0.000
~
9.999
【
0.050
】
F5.13 Integral gain Ki
Range: 0.000
~
9.999
【
0.050
】
F5.14 Sampling cycle T
Range: 0.01
~
50.00s
【
0.50s
】
The bigger the proportional gain Kp, the faster the
response, but oscillation may occur easily if Kp is
too big.
If only proportional gain K
P
is used in regulation,
the error cannot be eliminated completely.
Therefore, it is preferred to use the integral gain
Ki to form a PI control system. The bigger the Ki,
the faster the response, but oscillation may occur
if Ki is too big.
F5.04 refers to the sampling cycle of feedback
value. The PI regulator calculate once in each
sampling cycle. The bigger the sampling cycle the
slower the response.
F5.15 Error limit
Range: 0.0
~
20
%【
2.0
%】
F5.15 is the max. error between system output
and the close-loop reference, as shown in Fig.
5-34. PI regulator stops operation when the
feedback error is within this range. Setting this
parameter correctly is helpful to improve the
system output accuracy and stability.
Error limit
Feedback value
Ref
Output
Freq
time
time
Fig. 5-34 Error Limit Schematic Diagram
F5.16 Close-loop
regulation characteristic
Range: 0, 1
【
0
】
0: Positive logic
Set F5.16 to 0 if the motor speed is required to
increase with the reference.
1: Negative logic
Set F5.16 to 1 if the motor speed is required to
decrease with the increase of the reference.
F5.17 Integral regulation Range: 0, 1
【
0
】
0: Stop integral regulation when the frequency
reaches the upper or lower limits
1: Continue the integral regulation when the
frequency reaches the upper or lower limits
It is recommended to set the parameter at 0 for
the system that requires fast response.
F5.18 Preset frequency
Range:0.00~650.00Hz
【
0.00Hz
】
F5.19 Preset frequency
hold time
Range: 0.0
~
3600s
【
0.00s
】
The above parameters are helpful for the close
loop control to enter stable state quickly.
After close-loop running is started, the drive will
accelerate to the preset frequency F5.18 within
the accelerate time, and hold the frequency for a
period of time (F5.19), and then run according to
close-loop characteristic.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312





















































