





















8
Table1- 3 Warning level security risks
1
Play around the robot, you may be hit by a running robot, or be tripped by an obstacle
such as a cable to cause personal injury.
2
Unauthorized personnel change the security configuration parameters, causing the
safety function to fail or danger.
3
Scratches and punctures caused by sharp surfaces such as other devices in the work
environment or robot end effector.
4 The robot is a precision machine and pedaling may cause damage to the robot.
5
If the clamp is not in place or before the power supply of the robot is turned off or the
gas source is turned off (it is not determined whether the end effector firmly holds the
object without falling off due to loss of power). If the clamped object is not removed, it
may cause danger, such as people being injured by crashing.
6
There is a risk of accidental movement of the robot. Under no circumstances should you
stand under any axis of the robot!
7
The robot is a precision machine. If it is not placed smoothly during handling, it may
cause vibration and may cause damage to the internal components of the robot.
Table1- 4 Potential safety hazards that may result in electric shock
1 Using a non-original cable may pose an unknown hazard.
2 Contact with liquids by electrical equipment may result in a risk of electric leakage.
3 There may be an electric shock hazard when the electrical connection is incorrect.
4
Be sure to handle replacement work after turning off the power to the controller and
related equipment and unplugging the power cord. If the work is performed while the
power is on, it may cause electric shock or malfunction.
Содержание myCobot Pro 600
Страница 1: ...1 Elephant Robotics User Manual myCobot Pro 600 Language English Compiled in 2022 3 28...
Страница 14: ...14 2 QuickStart 2 1 Installation Instructions for the Robot Arm 1 Full unpacked items of robot arm...
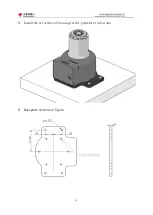
Страница 19: ...19 8 Install the set screws of housing for the pedestal of robot arm 9 Baseplate dimension figure...
Страница 27: ...27 Fig 2 9 State of Being Not Powered On...
Страница 28: ...28 Fig 2 10 In the Process of Being Powered On Fig 2 11 Completion of Being Powered On...
Страница 35: ...35...
Страница 37: ...37 3 2 Product Appearance and Composition Fig 3 1 Product Composition...
Страница 38: ...38 3 3 Working Principles and Specifications 3 3 1 Working Space...
Страница 39: ...39 3 3 2 Coordinate System DH parameters and coordinate system Fig 3 2 DH Coordinate System...
Страница 40: ...40 Fig 3 2 DH Coordinate Parameter...
Страница 45: ...45 Fig 3 10 Size Parameters of End Mounting Hole...
Страница 71: ...71 Figure 2 21 Initialization 2 Default program Figure 2 22 shows the default program settings page...
Страница 75: ...75 Figure 2 25 Language and unit 6 Time Figure 2 26 shows the time setting page...
Страница 88: ...88 Figure 3 13 Network settings...
Страница 95: ...95 Figure 3 21 Basic Settings...
Страница 113: ...113 Figure 4 17 Subprogram Figure 4 18 Display subroutine...
Страница 135: ...135 Fig 5 88 Connect to RoboFlow Fig 5 89 Connected Successfully...





































































