




























Mechanical Operation and Maintenance Manual for ER20-1700 Industrial Robot
15
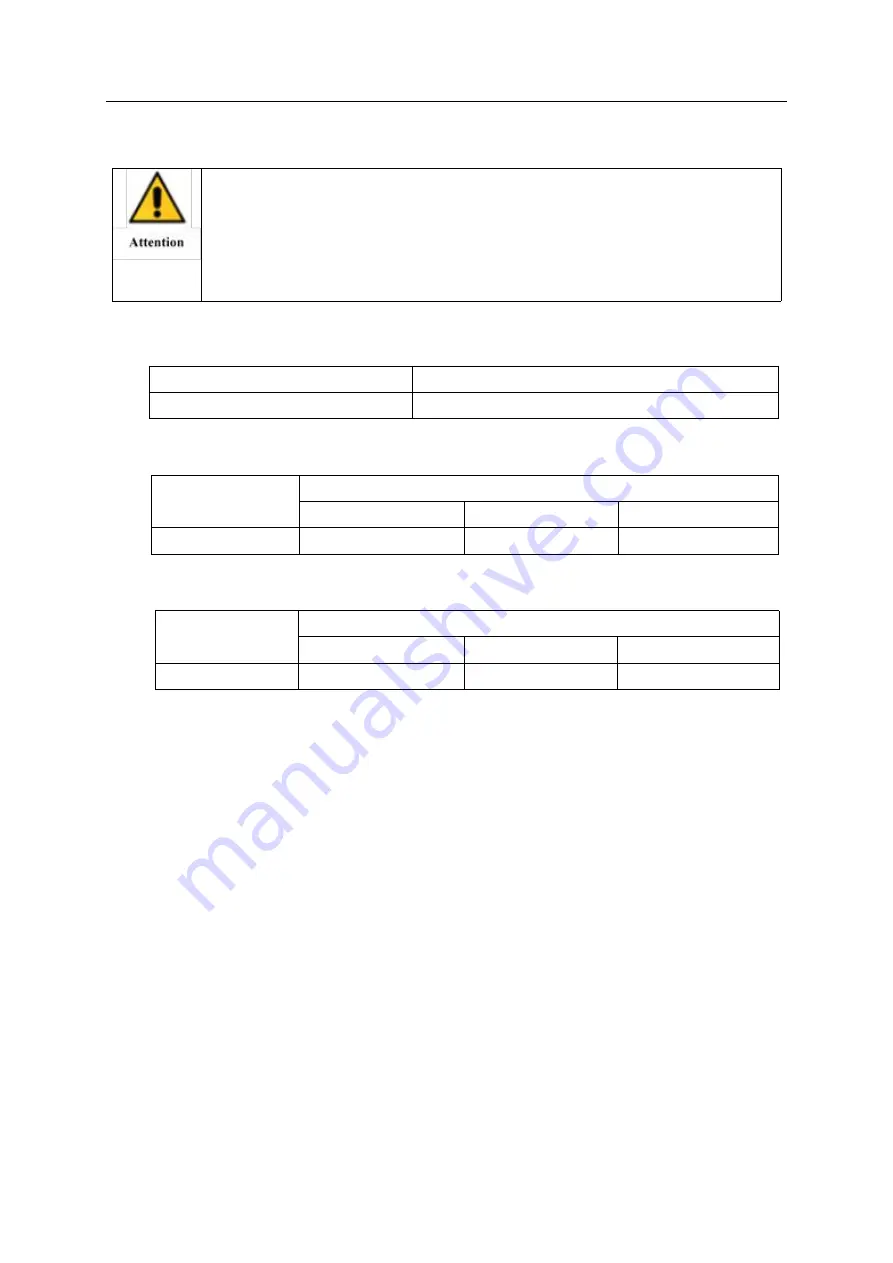
2.7 Maximum Wrist Payload
The installation payload at the front of the wrist is affected by the maximum
carrying weight of the wrist, the Maximum payload torque value, and the
maximum moment of inertia. The maximum payload torque changes depending on
the actual moment of inertia. The wrist payload should be strictly controlled within
the value range. Otherwise, normal operation cannot be guaranteed.
2.7.1 Maximum Carrying Weight
2.7.2 Maximum Static Payload Torque
Model
Maximum static payload torque
Axis J4 rotation
Axis J5 rotation
Axis J6 rotation
ER20-1700
42 Nm
42 Nm
26Nm
2.7.3 Maximum Moment of Inertia
Model
Maximum Moment of Inertia
Axis J4 rotation
Axis J5 rotation
Axis J6 rotation
ER20-1700
1.18kgm2
1.18 kgm2
0.8 kgm2
Model
Maximum carrying weight
ER20-1700
20 kg