




























Mechanical Operation and Maintenance Manual for ER20-1700 Industrial Robot
13
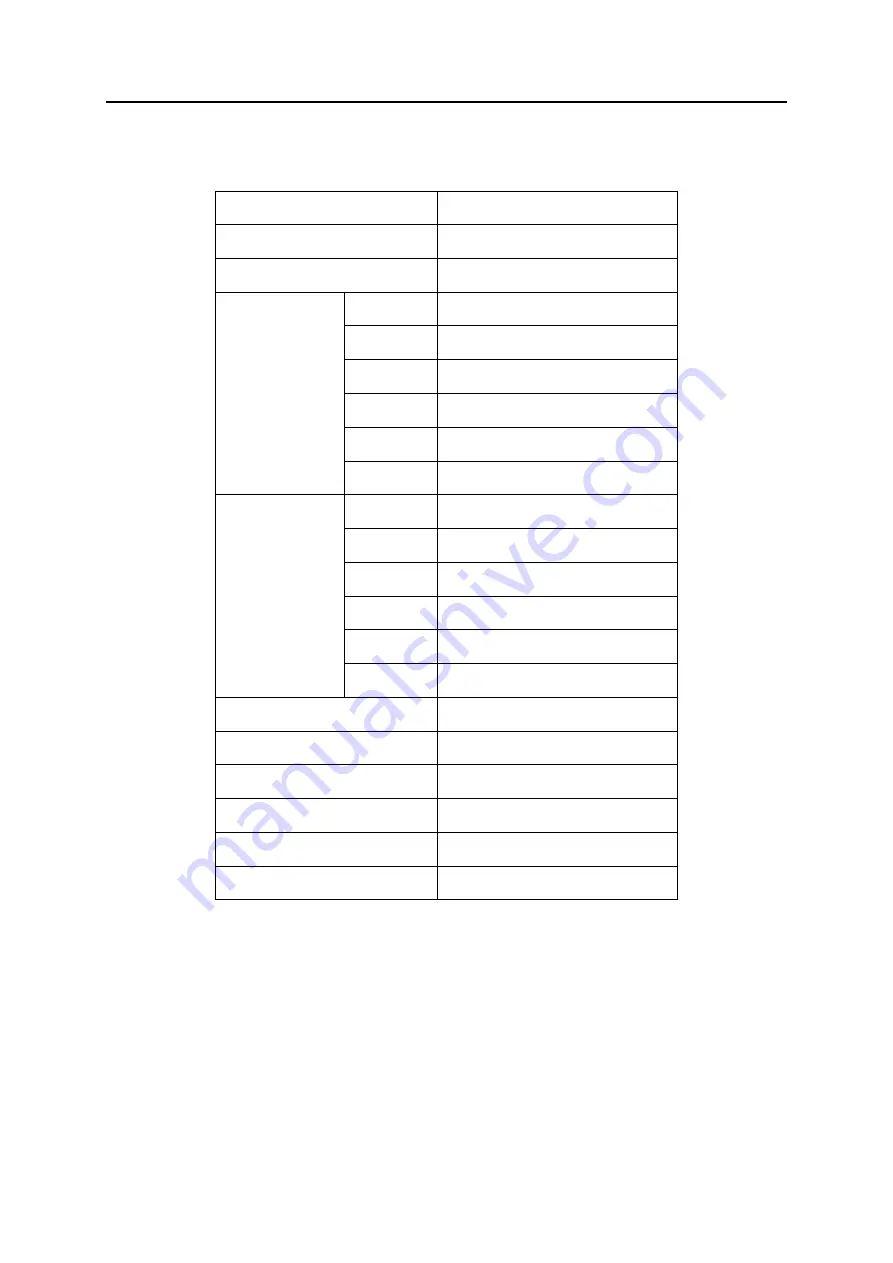
2.6 Robot Performance Parameters
Table 2-2 Performance Parameters
Model
ER20-1700
Movement Type
multi joint
Control axis
six axes
Maximum speed
Axis J1
170°/s
Axis J2
150°/s
Axis J3
146°/s
Axis J4
360°/s
Axis J5
360°/s
Axis J6
550°/s
Maximum
Motion Range
Axis J1
±175°
Axis J2
+64°/-142°
Axis J3
+165°/-73°
Axis J4
±178°
Axis J5
±128°
Axis J6
±720°
Arm span
1722mm
Maximum writ payload
20kg
Installation conditions
ground, support, upside down
Protection class
IP65(wrist)/ IP54(other parts)
repeatability
±0.06mm
Body weight
220kg


































































