





























SHENZHEN ECON TECHNOLOGY CO.,LTD User Manual For
EHS-580 EtherCAT Hybrid Servo Drive
(6040h) is invalid triggered (for example 6040h = 0x2F/4F), it can be interrupted
C:
The logic of bit 5 and bit 12 is always reverse in PP mode.
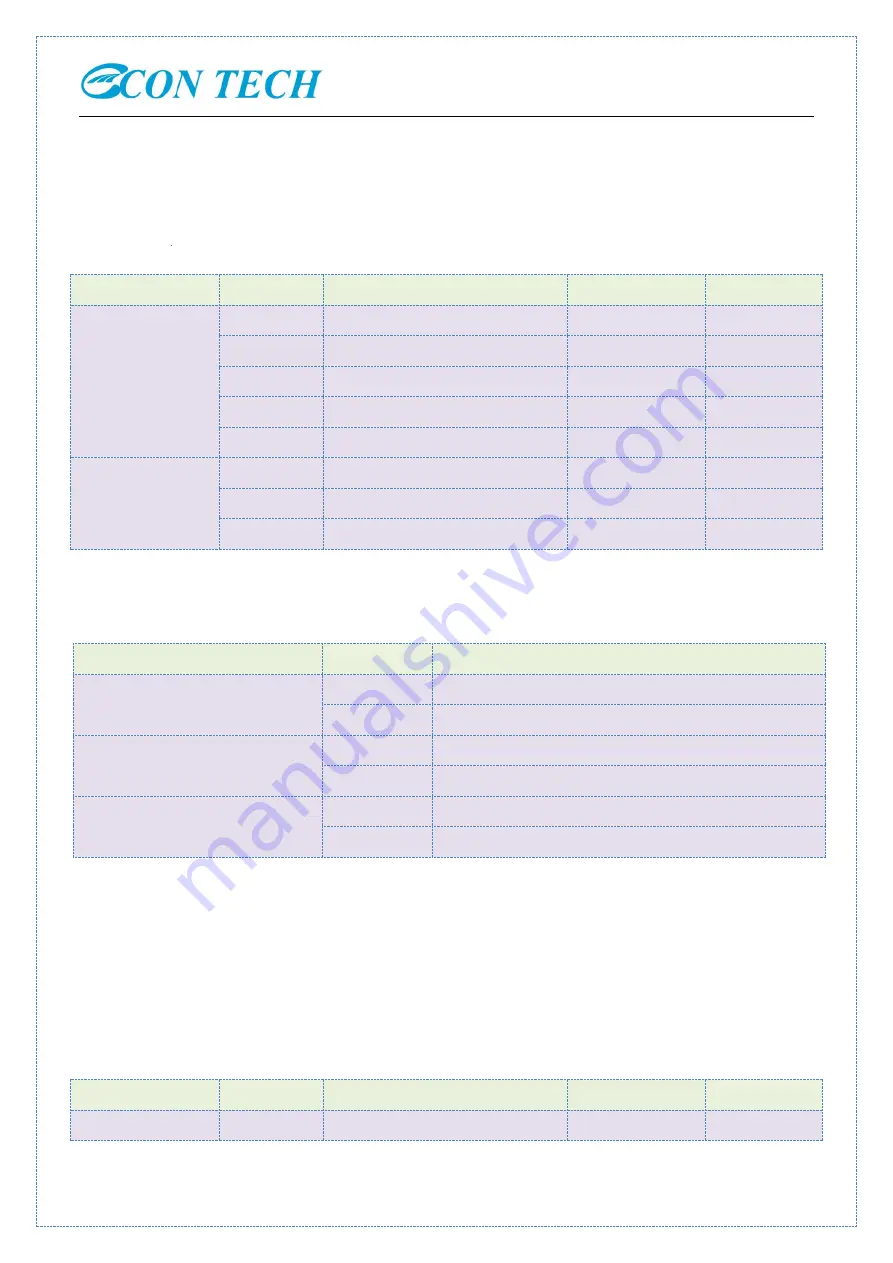
2.2 Profile velocity mode(PV )
Profile velocity mode is a relatively simple operating mode via execution related command sending by EtherCAT
master
Data write/read
Object
Description
Value
Unit
RXPDO
6060h
Operation Mode
1
-
6040h
Control word
User self-defined
-
60FFh
Target Position
User self-defined
Unit
6083+00h
Profile Acceleration
User self-defined
Unit/S^2
6084+00h
Profile Deceleration
User self-defined
Unit/S^2
TXPDO
6041h
Status word
Read only
-
6064h
Actually position Feedback
Read only
Unit
606Ch
Actual velocity feedback
Read only
Unit/s
2.2.1Controlword and Status word
In PV Mode, bits 4~6of Control word (6040h) are not effective, the movement will be active by setting some
movement parameters, including target velocity (60FFh), acceleration/deceleration (6083h/6084h).
Bit
Value
Description
8(quickly stop)
0
Quickly stop is disabled
1
Quickly stop is enabled
10(speed reached)
0
The current speed has not reach to target speed
1
The current speed reach to target speed
12 (speed is 0)
0
Speed is not 0 , the movement is not completed
1
Speed is 0 or the speed is ready to be 0 with Dec
2.3Cyclic synchronous position mode(CSP)
Cyclic Synchronous Position mode (CSP Mode) assigns target position to EHS-580hybrid servo drives by Master's
profile creation function through cyclic communication. Drives internally execute position/velocity control with
receipt of target position in each cycle.
The supported synchronizing cycles are: 250us, 500us, 750us, 1000us, 2000us and 4000us.
2.3.1 Related objects
Data write/read
Object
Description
Value
Unit
6060h
Operation Mode
1
-







































































