





























Object description and parameterization
EL72x1-901x
218
Version: 1.9
7.2.4
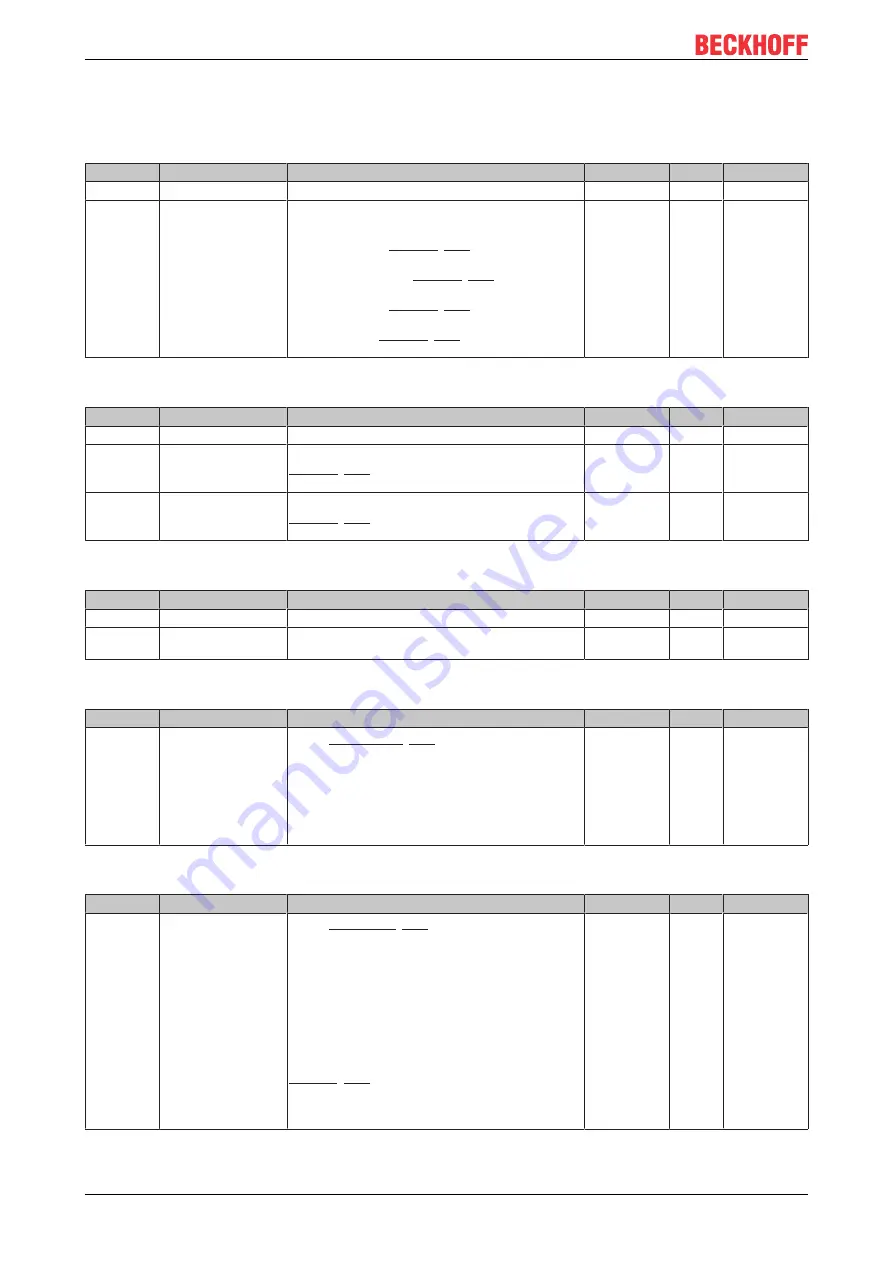
Input/output data
Index 2001 Outputs
Index (hex) Name
Meaning
Data type
Flags
Default
2001:0
Outputs
Maximum subindex
UINT8
RO
0x11 (17
dec
)
2001:11
Torque offset
Torque value offset
The value is specified in 1000th of the
rated current
= 0 :
M = ((Torque actual value / 1000) x (rated current /
√2)) x torque constant (
)
= 1 :
M = ((Torque actual value / 1000) x rated current)) x
torque constant (
)
INT16
RO
0x0000 (0
dec
)
Index 2008 Inputs
Index (hex) Name
Meaning
Data type
Flags
Default
2008:0
Inputs
Maximum subindex
UINT8
RO
0x02 (2
dec
)
2008:01
Info data1
Synchronous information (selection via subindex
)
UINT16
RO
0x0000 (0
dec
)
2008:01
Info data2
Synchronous information (selection via subindex
)
UINT16
RO
0x0000 (0
dec
)
Index 603E TxPDO Data invalid
Index (hex) Name
Meaning
Data type
Flags
Default
603E:0
TxPDO Data invalid
Max. subindex
UINT8
RO
0x02 (2
dec
)
603E:02
Position actual value
0: The current position is valid
1: The current position is invalid
BOOLEAN
RO P
0
Index 6040 Controlword
Index (hex) Name
Meaning
Data type
Flags
Default
6040:0
Controlword
Bit 0: Switch on
Bit 1: Enable voltage
Bit 2: reserved
Bit 3: Enable operation
Bit 4 - 6: reserved
Bit 7: Fault reset
Bit 8 - 15: reserved
UINT16
RO
0x0000 (0
dec
)
Index 6041 Statusword
Index (hex) Name
Meaning
Data type
Flags
Default
6041:0
Statusword
Bit 0: Ready to switch on
Bit 1: Switched on
Bit 2: Operation enabled
Bit 3: Fault
Bit 4: reserved
Bit 5: reserved
Bit 6: Switch on disabled
Bit 7: Warning
Bit 8 + 9: reserved
Bit 10: TxPDOToggle (selection/deselection via
Bit 11: Internal limit active
Bit 12: (Target value ignored)
Bit 13 - 15: reserved
UINT16
RO
0x0000 (0
dec
)
Содержание EL72 1-901 Series
Страница 1: ...Documentation EL72x1 901x Servo Motor Terminals with OCT and STO 50 V DC 1 9 2020 02 18 Version Date...
Страница 2: ......
Страница 6: ...Table of contents EL72x1 901x 6 Version 1 9...
Страница 20: ...Product overview EL72x1 901x 20 Version 1 9 2 3 Technical data...
Страница 49: ...Installation EL72x1 901x 49 Version 1 9 Fig 36 Shield busbar Fig 37 Shield busbar clamp...
Страница 86: ...Commissioning EL72x1 901x 86 Version 1 9 Fig 88 Incorrect driver settings for the Ethernet port...
Страница 140: ...Commissioning EL72x1 901x 140 Version 1 9 0hex 80hex Fault reset 6hex Shutdown 7hex Switch on Fhex Enable operation...
Страница 141: ...Commissioning EL72x1 901x 141 Version 1 9 Fig 176 DS402 State Machine...
Страница 150: ...Commissioning EL72x1 901x 150 Version 1 9 Fig 184 Touch Probe inputs...
Страница 172: ...Commissioning EL72x1 901x 172 Version 1 9 Fig 207 Process Data tab SM2 EL72x1 0010 default...
Страница 256: ...Appendix EL72x1 901x 256 Version 1 9 9 5 Certificates Fig 233 EL72x1 9014_Certificate...







































































