

























September 2012
L010194
11
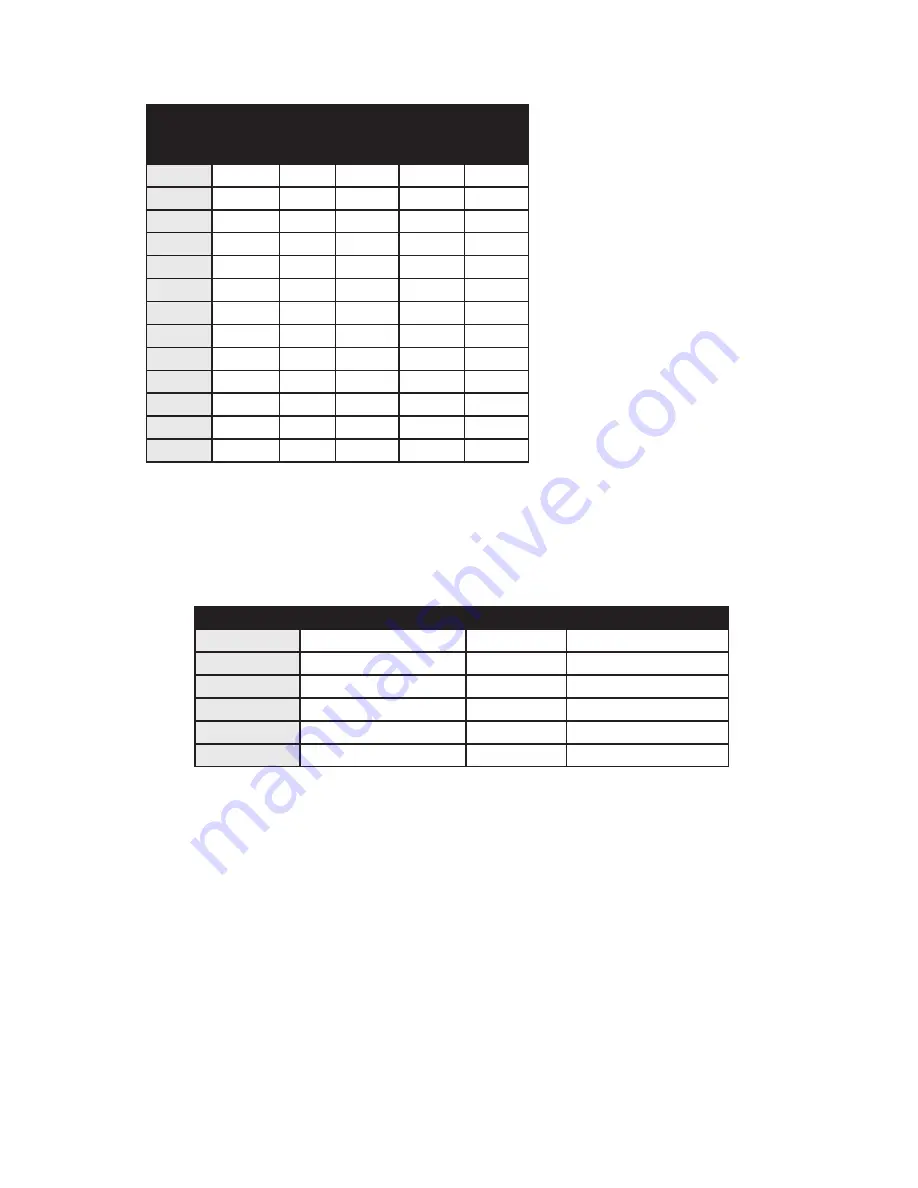
Step Motor Selection Guide
Anaheim Automation offers motor cable, making hookups quickly and easy! Contact the
factory of visit our website www.anaheimautomation.com for motor and cable offerings.
Part
Number
Unipolar
Rating
Series
Peak
Rating
Parallel
Peak
Rating
Series
Current
Setting
Parallel
Current
Setting
23Y206
3.0A
3.0A
6.0A
60%
100%
23Y210
5.0A
5.0A
10.0A
100%
100%
23Y306
3.0A
3.0A
6.0A
60%
100%
23Y310
5.0A
5.0A
10.0A
100%
100%
34Y108
4.0A
4.0A
8.0A
80%
100%
34Y207
3.5A
3.5A
7.0A
70%
100%
34Y307
3.5A
3.5A
7.0A
70%
100%
23Y108
4.0A
4.0A
8.0A
80%
100%
23Y106
3.0A
3.0A
6.0A
60%
100%
23Y104
2.0A
2.0A
4.0A
40%
80%
17Y302
---
1.0A
---
22%
---
17Y202
---
1.0A
---
22%
---
17Y102
---
1.0A
---
22%
---
Setting the Output Current
The output current on the DPC50501 is set by an onboard potentiometer. This potentiometer deter-
mines the per phase peak output current of the driver. The relationship between the output current
and the potentiometer value is as follows:
Reducing Output Current
Reducing the output current is accomplished by setting switch 1 of the DIP switch to the ON position
and occurs approximately 20mSec after the last positive going edge of the step clock input. The
amount of current per phase in the reduction mode is approximately 50% of the set current. When
the current reduction circuit is activated, the current reduction resistor is paralleled with the current
adjustment potentiometer. This lowers the total resistance value, and thus lowers the per phase
output current.
Determining Output Current
The output current for the motor used when microstepping is determined differently from that of a full/half
step unipolar driver. In the DPC50501, a sine/cosine output function is used in rotating the motor. The
output current for a given motor is determined by the motors current rating and the wiring configuration of
the motor. There is a current adjustment potentiometer used to set the output current of the DPC50501.
This sets the peak output current of the sine/cosine waves. The specified motor current (which is the
unipolar value) is multiplied by a factor of 1.0, 1.4, or 2.0 depending on the motor configuration (series,
half-coil, or parallel).
Peak Current Potentiometer Setting Peak Current Potentiometer Setting
0.5A
0%
3.0A
60%
0.6A
10%
3.5A
70%
0.9A
20%
4.0A
80%
1.5A
30%
4.5A
90%
2.0A
40%
5.0A
100%
2.5A
50%
--
July 2018