






















Fixed Spot Thermometers
User Guide
4 - 12
SPOT Actuator
4.6 Modbus TCP
The actuator can be controlled, all settings adjusted, and full scan data read
out using Modbus TCP.
The actuator is a Modbus TCP slave/server, so the control system must be
a Modbus TCP Master. Alternatively an Anybus X-Gateway can be used to
interpret to other communications protocols such as Profibus, EthernetIP.
The actuator position is controlled in steps of 0.1 degrees, over at least
90 degrees of movement. For ease of integer-based arithmetic, these are
available as integer steps centred at position 600. The position displayed
as 0 degrees on the webserver corresponds to Modbus value of 600 for the
CurrentPosition and SetPosition registers.
All settings and outputs are configured as Modbus Holding Registers, as for
the SPOT thermometer. The settings table is shown on the following pages.
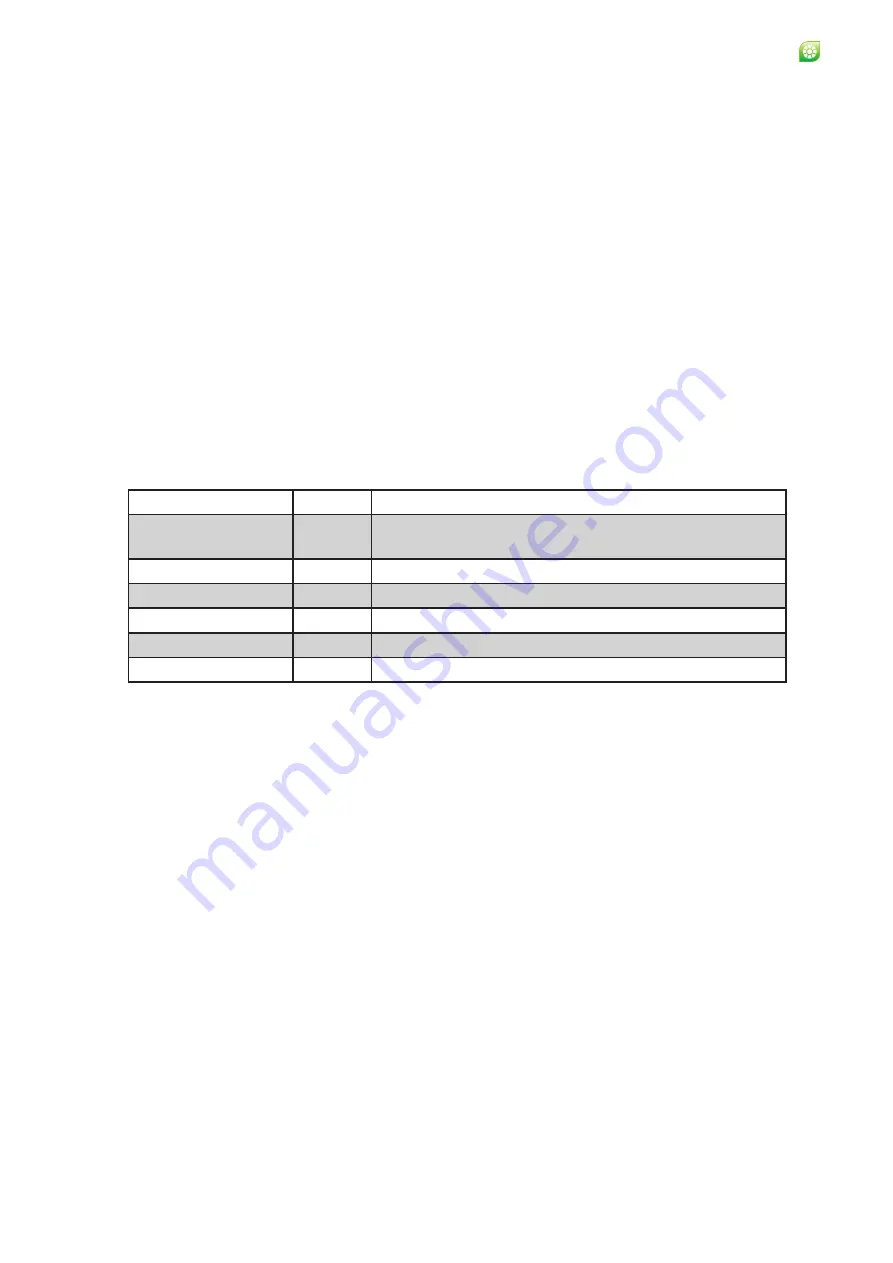
The SPOT Actuator uses standard Modbus TCP protocol, with messages of the
format:
Modbus TCP Frame Format
Name
Length Function
Transaction
Identifier
2 bytes For synchronization between messages of
server & client
Protocol Identifier
2 bytes Zero for Modbus/TCP
Length Field
2 bytes Number of remaining bytes in this frame
Unit Identifier
1 byte
Slave Address (255 if not used)
Function code
1 byte
Function codes (see tables below)
Data bytes
n bytes Data as response or commands
The Actuator uses read and write instructions to holding registers for all
communication. It does not allow direct access to its inputs and outputs.
Thus the only MODBUS function codes that are supported are 3 (read one
or more registers), 6 (write to a single register) and 10 (write multiple
registers).
Содержание SPOT ACTUATOR
Страница 11: ...3 4 Installation Drawings...
Страница 12: ......
Страница 13: ......
Страница 14: ......
Страница 17: ......
Страница 18: ...Blank...







































































