




















NETWORK DATA FORMATS
ADVANCED MICRO CONTROLS INC.
7
56
Command Mode (continued)
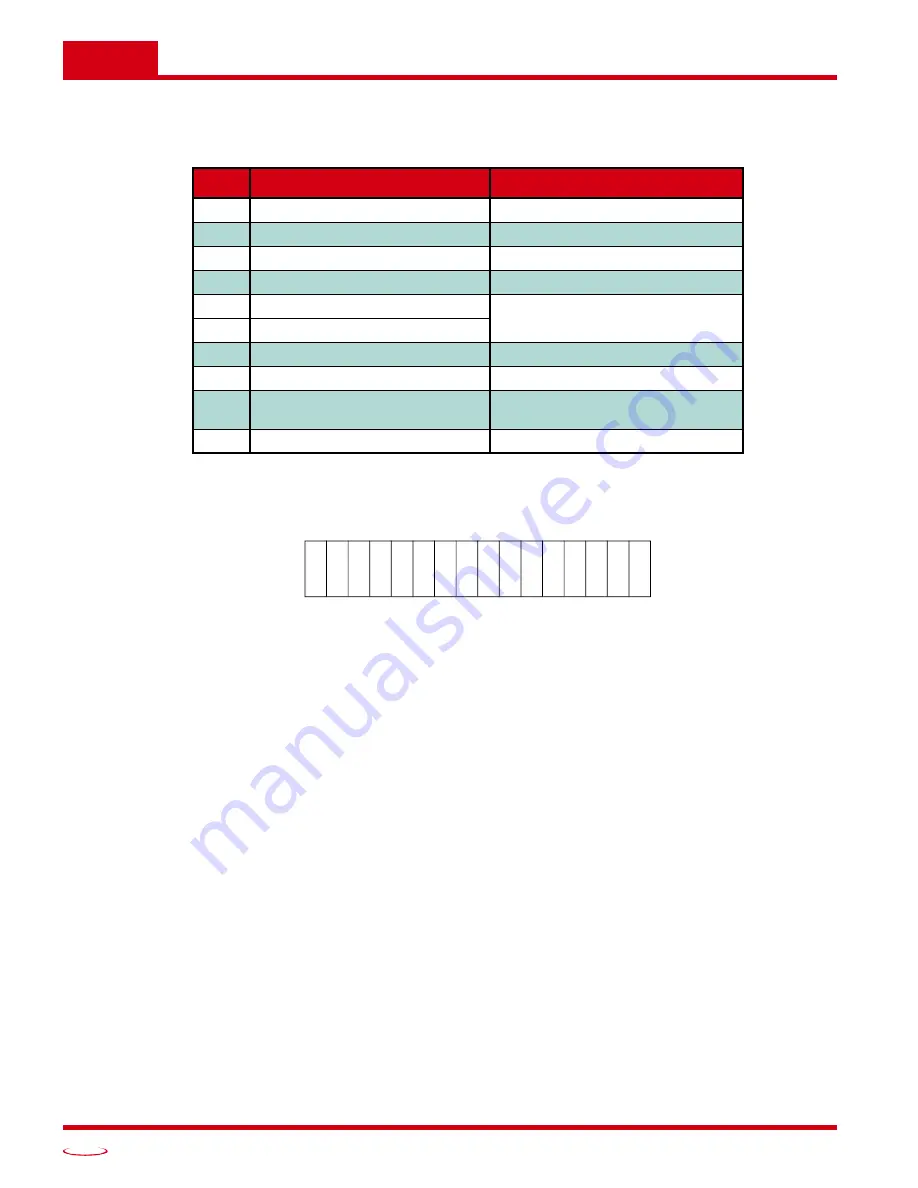
Electronic Gearing Mode Data Format
Control Word 1 Format
Figure 7.3 Command Mode: Control Word 1 Format
Bit 15: Mode Bit –
“1” for Configuration Mode Programming “0” for Command Mode Programming. The
SD17060E powers up in Configuration Mode and will not switch to Command Mode until a valid
configuration is written to the drive. Power is also removed from the motor until the SD17060E has
a valid configuration written to it.
Bit 14: Preset Encoder Bit –
When set to “1” the SD17060E will preset the Encoder Position to the value
stored in Output Words 2 and 3.
Bit 13: Run Blend Move –
When set to “1” the SD17060E will run the blend move already stored in mem-
ory. The direction that the blend move is run in is controlled by the Blend Move Direction bit in
Control Word 2, bit 4.
Bits 11 & 12: Program Blend Move & Program Blend Move Segment Bits –
These bits are used to pro-
gram the Blend Move Segments before a blend move can be run. Their use is explained in the
section of this manual starting on page 21.
Bit 10: Clear Errors –
When set to “1” the SD17060E will clear all existing errors and attempt to use the
present data to run a new command.
Bit 9:
Preset Motor Position Bit –
When set to “1” the SD17060E will preset the Motor Position to the
value stored in Output Words 2 and 3.
Bit 8:
CCW Manual Move –
When set to “1” the SD17060E will run a Manual Move in the counter-clock-
wise direction. A full explanation of
can be found starting on page 16.
Bit 7:
CW Manual Move –
When set to “1” the SD17060E will run a Manual Move in the clockwise direc-
tion. A full explanation of
can be found starting on page 16.
Word
Command Data
Range
0
Control Word 1
See below
1
Control Word 2
See below
2
Electronic Gearing Numerator
1 to 255
3
Electronic Gearing Denominator
1 to 255
4
Programmed Speed: Upper Word Combined value between the Starting
Speed and 2,999,999 Steps/sec
5
Programmed Speed: Lower Word
6
Acceleration
1 to 5,000 steps/ms/sec
7
Deceleration
1 to 5,000 steps/ms/sec.
8
Motor Current (X10)
10 to 60, Even numbers only.
Represents 1.0 to 6.0 A
RMS
9
Acceleration Jerk
0 to 5,000
Control Word 1
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
MOD
E
Pr
s
tE
n
c
R
unB
M
v
Pr
g
B
M
S
Pr
g
B
M
v
Clr
E
rr
Pr
s
tP
o
s
M
anM
v–
M
anM
v+
Ho
m
e
–
Ho
m
e
+
I-
Sto
p
R
e
s
mMv
Ho
ld
M
v
Re
lM
v
Ab
s
M
v







































































