





























24
SE-Power FS STO-manual vers. 1.6 en.12.08.2015
The finite state machine in the servo drive SE-Power FS has its own status in parallel to the
safety module SE-Power FS Safety Module STO. Due to the discrepancy time analysis, this
finite state machine may reach the “Safe status” only with a considerable delay. Accordingly,
this state can also be signalled via digital outputs or a fieldbus only with a considerable
delay. The power end stage itself is
then, however, “safely switched off”. This finite state
machine is processed within the 10ms cycle.
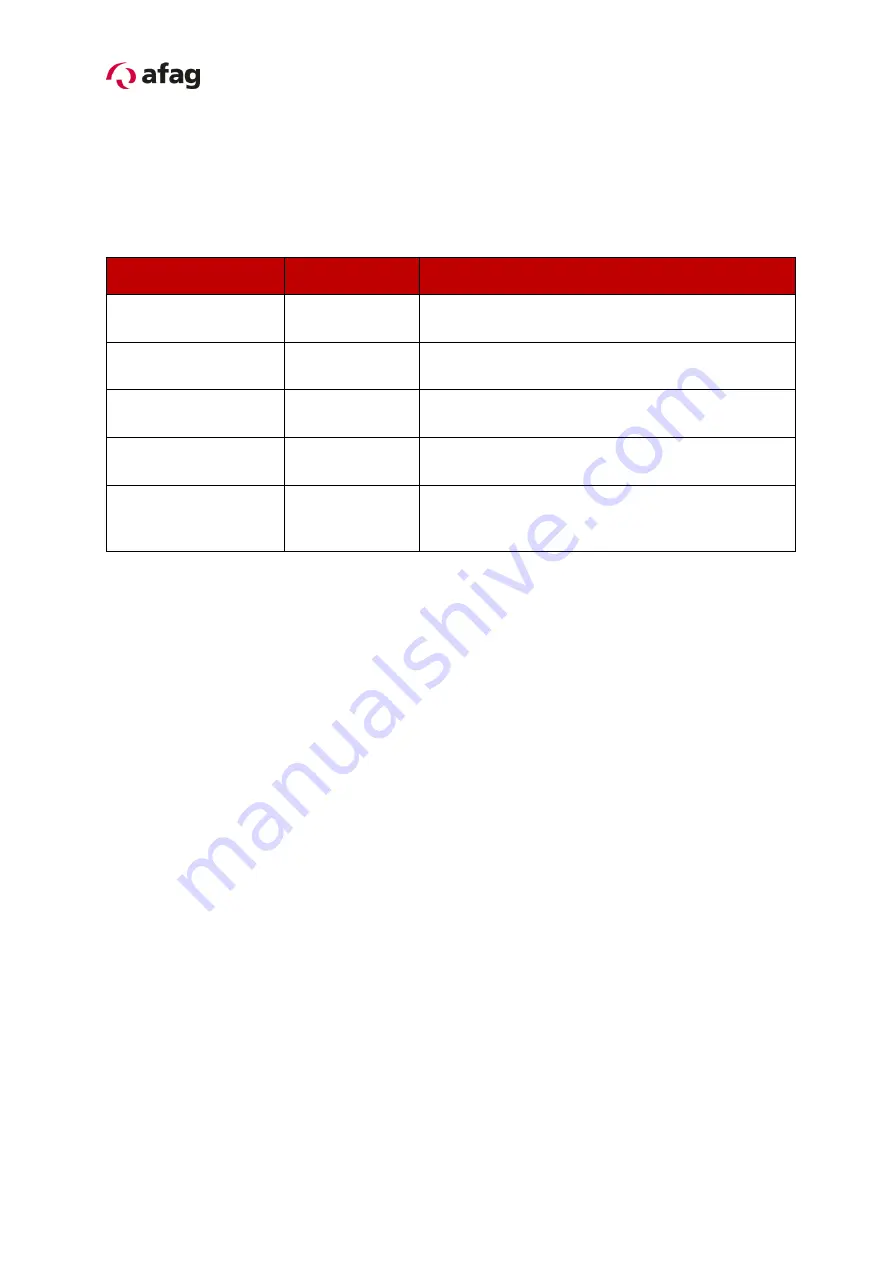
This generally results in a graded response speed as per
Function
Response time Reaction
Switching time from
high to low
T_STO-
A/B_OFF
Section 9.1.4, Table 21
Switching time from
low to high
T_STO-A/B_ON
Section 9.1.4, Table 21
Detection of driver
supply failure
t
Reaction
125µs
Activation of the power semiconductor (PWM) is
switched off
Activation of holding
brake
t
Reaction
10ms
Activation of the holding brake after detection of
the driver supply failure
Signal analysis and
status display
t
Reaction
10ms
Status transitions in the internal finite state
machine, triggering an error message and
showing the status on the display if necessary
Table 3:
Detection and response times of the driver supply voltage





















































