





























Note
Action
Push the carriage manually to make
enough space to remove the drive unit.
CAUTION
Be careful when moving the carriage
manually. If the moving speed is too fast,
it may cause unexpected injury.
Please consider the weight of the robot and
the carriage. For the weight of the robot,
refer to the identification plate of the robot.
For the weight of the carriage, refer to the
identification plate of the track.
7
Remove the drive unit with the bracket.
Note
The weight of the drive unit is almost 35
kg, be careful when lifting the drive unit.
Use a lifting tool or at least two people to
lift the drive unit.
8
Disassembling the motor from the gearbox
Note
Action
CAUTION
Whenever parting/mating motor and gear-
box, the gears may be damaged if excess-
ive force is used!
1
DANGER
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot
and for the track motion.
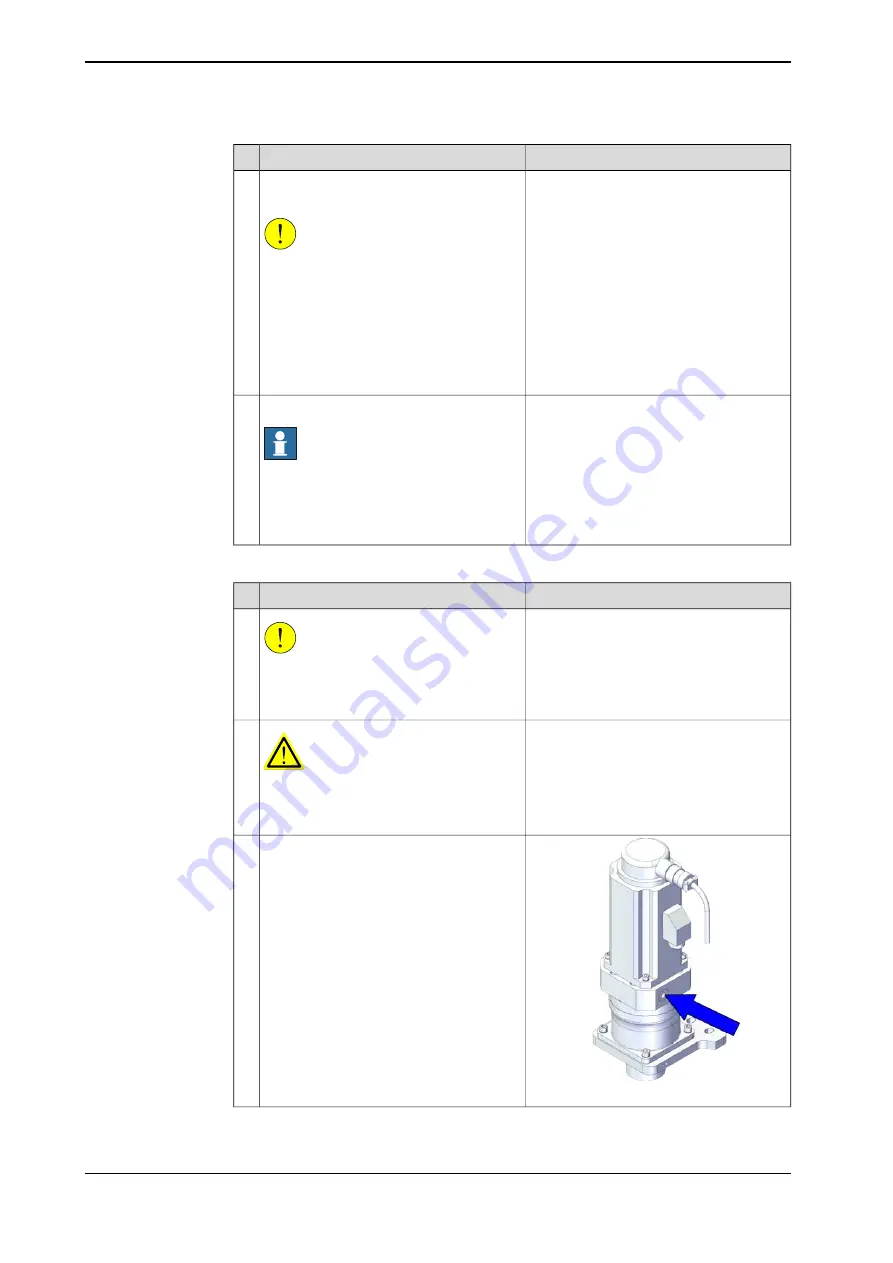
2
xx2200000623
Remove the stopper
3
Continues on next page
224
Product manual - IRT 710
3HKA00000186299-001 Revision: B
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.2.1 Replacing the motor and gearbox
Continued
Содержание IRT 710
Страница 1: ...ROBOTICS Product manual IRT 710 ...
Страница 2: ...Trace back information Workspace Systems version a40 Checked in 2023 10 18 Skribenta version 5 5 019 ...
Страница 14: ...This page is intentionally left blank ...
Страница 58: ...This page is intentionally left blank ...
Страница 84: ...This page is intentionally left blank ...
Страница 360: ...This page is intentionally left blank ...
Страница 364: ...This page is intentionally left blank ...
Страница 378: ...This page is intentionally left blank ...
Страница 380: ...This page is intentionally left blank ...
Страница 383: ......







































































