





























4 Repair
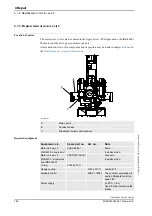
4.7.2. Replacement of motor, axis 2
195
3HAC022032-001 Revision: E
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
Removal, motor axis 2
The procedure below details how to remove the motor, axis 2.
Measuring tool
3HAB 7887-1
3HAB 1408-1
Choose one of the two tools.
Other tools and
procedures may be
required. See references
to these procedures in
the step-by-step instruc-
tions below.
These procedures include
references to the tools
required.
Circuit Diagram
See chapter
Circuit diagram
in the
Product manual,
reference information
.
Calibration Pendulum
Instruction
General calibration
information is included in
section
.
Equipment, etc.
Spare part no.
Art. no.
Note
Action
Info/Illustration
1.
Turn off all electric power, hydraulic and pneumatic
pressure supplies to the robot!
For Foundry Prime robots: Do not turn off the air
pressure to motors and SMB.
2.
Danger!
Secure the arm system before removing the motor!
The brake is located in the motor and is therefore
released when the motor is removed.
3.
Whenever parting/mating motor and gearbox, the
gears may be damaged if excessive force is used!
4. Remove the cover of the connection box.
5. Disconnect all the connectors in the motor.
6. Remove the connection box.
7. Note the position of the motor label before removing
it. The motor must be mounted in the same position.
Continued
Continues on next page
Содержание IRB 4400 - 45
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Страница 236: ...4 Repair 4 9 2 Repair routines 3HAC022032 001 Revision E 234 Copyright 2004 2008 ABB All rights reserved ...
Страница 256: ...Product documentation M2004 3HAC022032 001 Revision E 254 Copyright 2004 2008 ABB All rights reserved ...
Страница 294: ...7 Part list 7 5 Position switch axis 1 3HAC022032 001 Revision E 292 Copyright 2004 2008 ABB All rights reserved ...
Страница 296: ......
Страница 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Страница 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Страница 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Страница 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Страница 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Страница 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Страница 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Страница 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Страница 306: ... Copyright 2004 2006 ABB All rights reserved 4 3 9 R1 SMB R2 SMB R1 G 8 5 7 3hab 3365 1 x Seriemätenhet Foldout 7 ...
Страница 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Страница 309: ...9 Circuit diagram 8 1 Introduction 3HAC022032 001 Revision E 296 Copyright 2004 2008 ABB All rights reserved ...
Страница 311: ... Copyright 2004 2006 ABB All rights reserved List of Contents Location of Connection Point Sheet 101 ...
Страница 312: ... Copyright 2004 2006 ABB All rights reserved Brake Release Unit Serial Measurement Board Sheet 102 ...
Страница 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Страница 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Страница 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Страница 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Страница 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Страница 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Страница 321: ......
Страница 322: ...ABB Robotics S 721 68 VÄSTERÅS SWEDEN Telephone 46 0 21 344000 Telefax 46 0 21 132592 3HAC 022032 001 Revision E en ...






































































