





























4 Repair
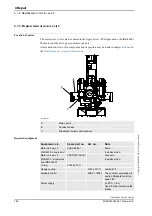
4.7.3. Replacement of motor, axis 3
3HAC022032-001 Revision: E
200
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
Refitting. motor axis 3
The procedure below details how to refit the motor, axis 3.
8. Remove the attachment screws and washers, motor.
Note! Oil will start to run out when removing the
motor!
Shown in the figure
.
9. Remove the motor.
Action
Info/Illustration
Action
Info/Illustration
1.
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot!
For Foundry Prime robots: Do not turn off
the air pressure to motors and SMB.
2.
Whenever parting/mating motor and
gearbox, the gears may be damaged if
excessive force is used!
3. Note! The motor units from ELMO and
YASKAWA are not compatible!
4. Check that the assembly surfaces are clean
from paint, lubricant etc.
Make sure that the motor and the gearbox
are not damaged or scratched.
5. Fit the o-ring to the new motor unit.
Part no. is specified in
6. Release the brake of the motor by
connecting the 24 VDC power supply.
Connect to connectorR3.MP3
•
+24V: pin 7
•
0V: pin 8
7. Apply flange sealing to the motor flange.
Art. no. is specified in
8. Place the new motor in the gearbox.
Do not damage the pinion and the gear
wheel!
Note the position of the motor! The motor
label should be mounted in the same
position as it had before the removal.
Continued
Continues on next page
Содержание IRB 4400 - 45
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Страница 236: ...4 Repair 4 9 2 Repair routines 3HAC022032 001 Revision E 234 Copyright 2004 2008 ABB All rights reserved ...
Страница 256: ...Product documentation M2004 3HAC022032 001 Revision E 254 Copyright 2004 2008 ABB All rights reserved ...
Страница 294: ...7 Part list 7 5 Position switch axis 1 3HAC022032 001 Revision E 292 Copyright 2004 2008 ABB All rights reserved ...
Страница 296: ......
Страница 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Страница 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Страница 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Страница 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Страница 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Страница 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Страница 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Страница 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Страница 306: ... Copyright 2004 2006 ABB All rights reserved 4 3 9 R1 SMB R2 SMB R1 G 8 5 7 3hab 3365 1 x Seriemätenhet Foldout 7 ...
Страница 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Страница 309: ...9 Circuit diagram 8 1 Introduction 3HAC022032 001 Revision E 296 Copyright 2004 2008 ABB All rights reserved ...
Страница 311: ... Copyright 2004 2006 ABB All rights reserved List of Contents Location of Connection Point Sheet 101 ...
Страница 312: ... Copyright 2004 2006 ABB All rights reserved Brake Release Unit Serial Measurement Board Sheet 102 ...
Страница 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Страница 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Страница 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Страница 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Страница 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Страница 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Страница 321: ......
Страница 322: ...ABB Robotics S 721 68 VÄSTERÅS SWEDEN Telephone 46 0 21 344000 Telefax 46 0 21 132592 3HAC 022032 001 Revision E en ...