





























4 Repair
4.4.1. Replacement of complete upper arm
3HAC022032-001 Revision: E
134
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
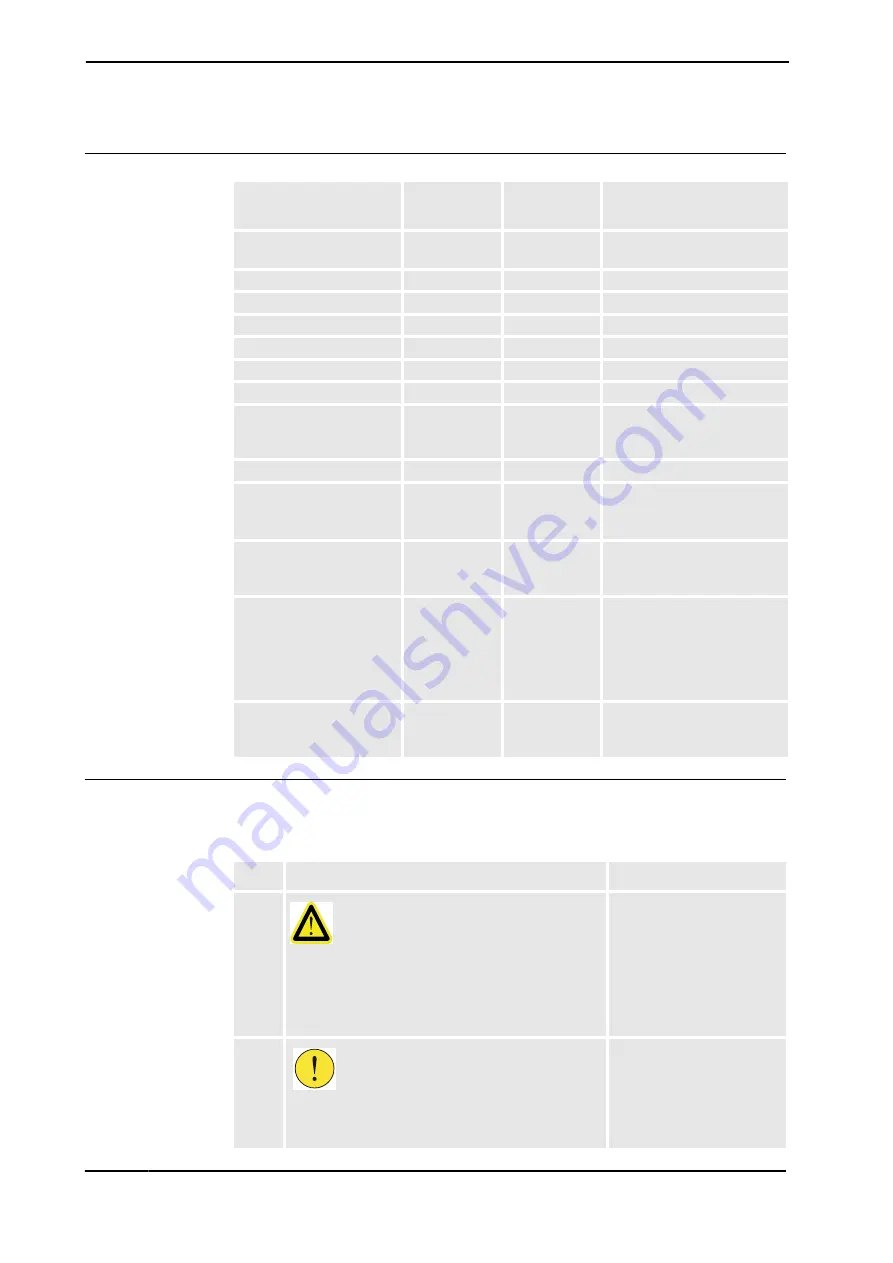
Required equipment
Removal, upper arm
The procedure below how to remove the complete upper arm from the robot.
Note! The following procedure also applies to the IRB 4450S.
Equipment, etc.
Spare part
no.
Art. no.
Note
Upper arm, without wrist
and motors
3HAC 17542-1
Foundry (also used for
standard)
Sealing ring
3HAC 7877-1
Taper roller bearing
3HAA 2103-13
VK cover
3HAC 12165-1
Shaft end
3HAC 4744-1
Grease
3HAB 3537-1
Used to grease the bearing.
Locking liquid
Loctite 243
Standard toolkit
3HAC 17594-1 The contents are defined in
section Standard toolkit on
page 264.
Dismounting tool
3HAC 0163-1
Used to pull out the shaft.
Mounting tool
3HAB 1463-1
Used to fit the inner ring of the
bearing.
Contains two separate parts.
De-air tool
3HAC 8704-1
Used to evacuate air when
refitting VK-cover, if the cover
has no grooves for venting.
Other tools and
procedures may be
required. See references
to these procedures in the
step-by-step instructions
below.
These procedures include
references to the tools
required.
Calibration Pendulum
Instruction
Art. no. is specified in section
Document references on
page 262.
Action
Info/Illustration
1.
Turn off all electric power, hydraulic and pneumatic
pressure supplies to the robot!
For Foundry Prime robots: Do not turn off the air
pressure to motors and SMB.
2.
The complete arm system weighs 232 kg! All lifting
equipment used must be sized accordingly!
Continued
Continues on next page
Содержание IRB 4400 - 45
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Страница 236: ...4 Repair 4 9 2 Repair routines 3HAC022032 001 Revision E 234 Copyright 2004 2008 ABB All rights reserved ...
Страница 256: ...Product documentation M2004 3HAC022032 001 Revision E 254 Copyright 2004 2008 ABB All rights reserved ...
Страница 294: ...7 Part list 7 5 Position switch axis 1 3HAC022032 001 Revision E 292 Copyright 2004 2008 ABB All rights reserved ...
Страница 296: ......
Страница 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Страница 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Страница 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Страница 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Страница 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Страница 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Страница 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Страница 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Страница 306: ... Copyright 2004 2006 ABB All rights reserved 4 3 9 R1 SMB R2 SMB R1 G 8 5 7 3hab 3365 1 x Seriemätenhet Foldout 7 ...
Страница 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Страница 309: ...9 Circuit diagram 8 1 Introduction 3HAC022032 001 Revision E 296 Copyright 2004 2008 ABB All rights reserved ...
Страница 311: ... Copyright 2004 2006 ABB All rights reserved List of Contents Location of Connection Point Sheet 101 ...
Страница 312: ... Copyright 2004 2006 ABB All rights reserved Brake Release Unit Serial Measurement Board Sheet 102 ...
Страница 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Страница 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Страница 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Страница 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Страница 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Страница 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Страница 321: ......
Страница 322: ...ABB Robotics S 721 68 VÄSTERÅS SWEDEN Telephone 46 0 21 344000 Telefax 46 0 21 132592 3HAC 022032 001 Revision E en ...







































































