





























3 Maintenance
3.3.4. Cleaning of manipulator
3HAC022032-001 Revision: E
96
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
3.3.4. Cleaning of manipulator
General
Depending on the protection class, different methods of cleaning the manipulator are allowed.
This section describes how to clean
•
the Standard version
•
the Foundry version
Standard version
The protection class is IP54.
The exterior of the robot should be cleaned as required. Use a vacuum cleaner or wipe it with
a cloth. Do not use compressed air and harsh solvents that can damage the sealing joints,
bearings, lacquer or cabling.
Foundry version
The protection class is IP 67, which means that the manipulator is watertight.
Do's and don'ts!
The section below specifies some special considerations when cleaning the robot.
Always!
•
Always use cleaning equipment as specified above! Any other cleaning equipment
may shorten the life of paintwork, rust inhibitors, signs, or labels!
•
Always check that all protective covers are fitted to the robot before cleaning!
Never!
•
Never remove any covers or other protective devices before cleaning the robot!
•
Never use any cleaning agents, e.g. compressed air or solvents, other than those
specified above!
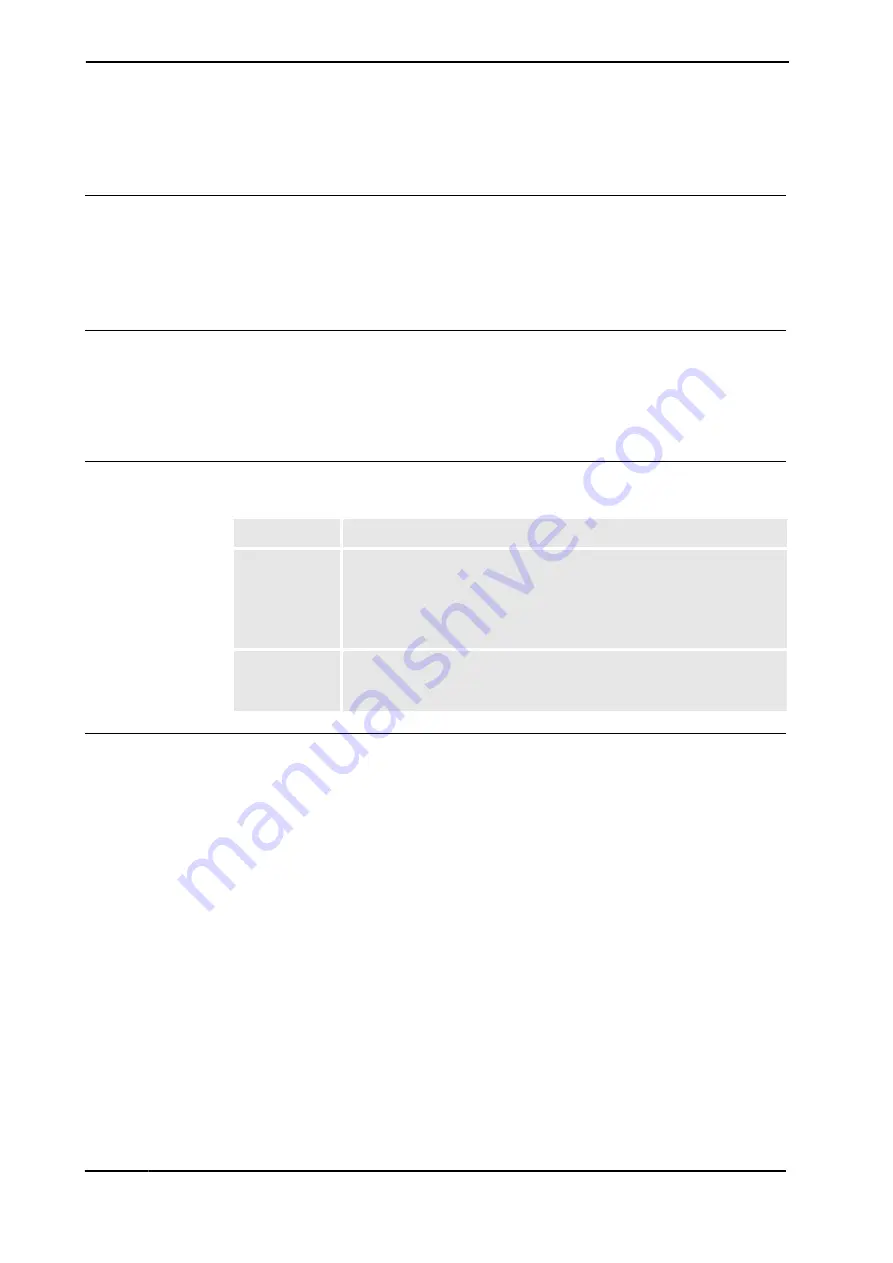
Equipment
Requirements
Steam cleaner
•
water pressure at nozzle: max. 2500 kN/m
2
(25 bar)
•
type of nozzle: fan jet, min. 45° spread
•
flow: max. 100 litres/min
•
distance from nozzle to encapsulation: min. 0.4 m
•
water temperature: max. 80° C
High pressure
water cleaner
•
fan jet nozzle should be used, min. 45° spread
•
max. water pressure on enclosures: 50 kN/m
2
(0.5 bar)
•
flow: max. 100 litres/min
Содержание IRB 4400 - 45
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Страница 236: ...4 Repair 4 9 2 Repair routines 3HAC022032 001 Revision E 234 Copyright 2004 2008 ABB All rights reserved ...
Страница 256: ...Product documentation M2004 3HAC022032 001 Revision E 254 Copyright 2004 2008 ABB All rights reserved ...
Страница 294: ...7 Part list 7 5 Position switch axis 1 3HAC022032 001 Revision E 292 Copyright 2004 2008 ABB All rights reserved ...
Страница 296: ......
Страница 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Страница 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Страница 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Страница 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Страница 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Страница 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Страница 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Страница 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Страница 306: ... Copyright 2004 2006 ABB All rights reserved 4 3 9 R1 SMB R2 SMB R1 G 8 5 7 3hab 3365 1 x Seriemätenhet Foldout 7 ...
Страница 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Страница 309: ...9 Circuit diagram 8 1 Introduction 3HAC022032 001 Revision E 296 Copyright 2004 2008 ABB All rights reserved ...
Страница 311: ... Copyright 2004 2006 ABB All rights reserved List of Contents Location of Connection Point Sheet 101 ...
Страница 312: ... Copyright 2004 2006 ABB All rights reserved Brake Release Unit Serial Measurement Board Sheet 102 ...
Страница 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Страница 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Страница 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Страница 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Страница 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Страница 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Страница 321: ......
Страница 322: ...ABB Robotics S 721 68 VÄSTERÅS SWEDEN Telephone 46 0 21 344000 Telefax 46 0 21 132592 3HAC 022032 001 Revision E en ...

































































