


























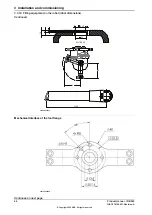

Hole configuration, base
This illustration shows the hole configuration used when securing the robot.
55°
1013
740
971
3x 120°
A
A
A
1
B
B
B
2
3
xx2100000837
Axis-1 gearbox
1
Axis-2 gearbox
2
Axis-3 gearbox
3
Robot mounting holes
A
Attachment holes M8 for lifting eyes
B
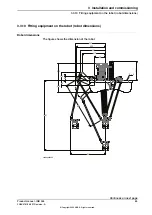
The three support points of the manipulator base box shall be mounted against
three flat surfaces with a flatness within the specification. Use shims if necessary.
See specification in
Requirements, foundation on page 38
Assembling and installing
The IRB 365 is delivered in sub-assemblies.
Continues on next page
Product manual - IRB 365
51
3HAC079185-001 Revision: A
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.4 Orienting, assembling and securing the manipulator
Continued
Содержание IRB 365
Страница 1: ...ROBOTICS Product manual IRB 365 ...
Страница 2: ...Trace back information Workspace 22B version a6 Checked in 2022 06 10 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 14: ...This page is intentionally left blank ...
Страница 198: ...This page is intentionally left blank ...
Страница 216: ...This page is intentionally left blank ...
Страница 232: ...This page is intentionally left blank ...
Страница 234: ...This page is intentionally left blank ...
Страница 238: ......
Страница 239: ......