



























1.4 Safety during installation and commissioning
National or regional regulations
The integrator of the robot system is responsible for the safety of the robot system.
The integrator is responsible that the robot system is designed and installed in
accordance with the safety requirements set forth in the applicable national and
regional standards and regulations.
The integrator of the robot system is required to perform a risk assessment.
Layout
The robot integrated to a robot system shall be designed to allow safe access to
all spaces during installation, operation, maintenance, and repair.
If robot movement can be initiated from an external control panel then an emergency
stop must also be available.
If the manipulator is delivered with mechanical stops, these can be used for reducing
the working space.
A perimeter safeguarding, for example a fence, shall be dimensioned to withstand
the following:
•
The force of the manipulator.
•
The force of the load handled by the robot if dropped or released at maximum
speed.
•
The maximum possible impact caused by a breaking or malfunctioning
rotating tool or other device fitted to the robot.
The maximum TCP speed and the maximum velocity of the robot axes are detailed
in the section
Robot motion
in the product specification for the respective
manipulator.
Consider exposure to hazards, such as slipping, tripping, and falling.
Hazards due to the working position and posture for a person working with or near
the robot shall be considered.
Hazards due to noise emission from the robot needs to be considered.
Consider hazards from other equipment in the robot system, for example, that
guards remain active until identified hazards are reduced to an acceptable level.
Allergenic material
See
Environmental information on page 218
for specification of allergenic materials
in the product, if any.
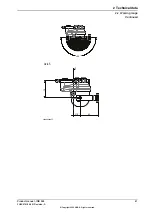
Securing the robot to the foundation
The robot must be properly fixed to its foundation/support, as described in the
respective product manual.
When the robot is installed at a height, hanging, or other than mounted directly on
the floor, there will be additional hazards.
Continues on next page
26
Product manual - IRB 365
3HAC079185-001 Revision: A
© Copyright 2022 ABB. All rights reserved.
1 Safety
1.4 Safety during installation and commissioning
Содержание IRB 365
Страница 1: ...ROBOTICS Product manual IRB 365 ...
Страница 2: ...Trace back information Workspace 22B version a6 Checked in 2022 06 10 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 14: ...This page is intentionally left blank ...
Страница 198: ...This page is intentionally left blank ...
Страница 216: ...This page is intentionally left blank ...
Страница 232: ...This page is intentionally left blank ...
Страница 234: ...This page is intentionally left blank ...
Страница 238: ......
Страница 239: ......







































































