





























37x
Relay units (6)
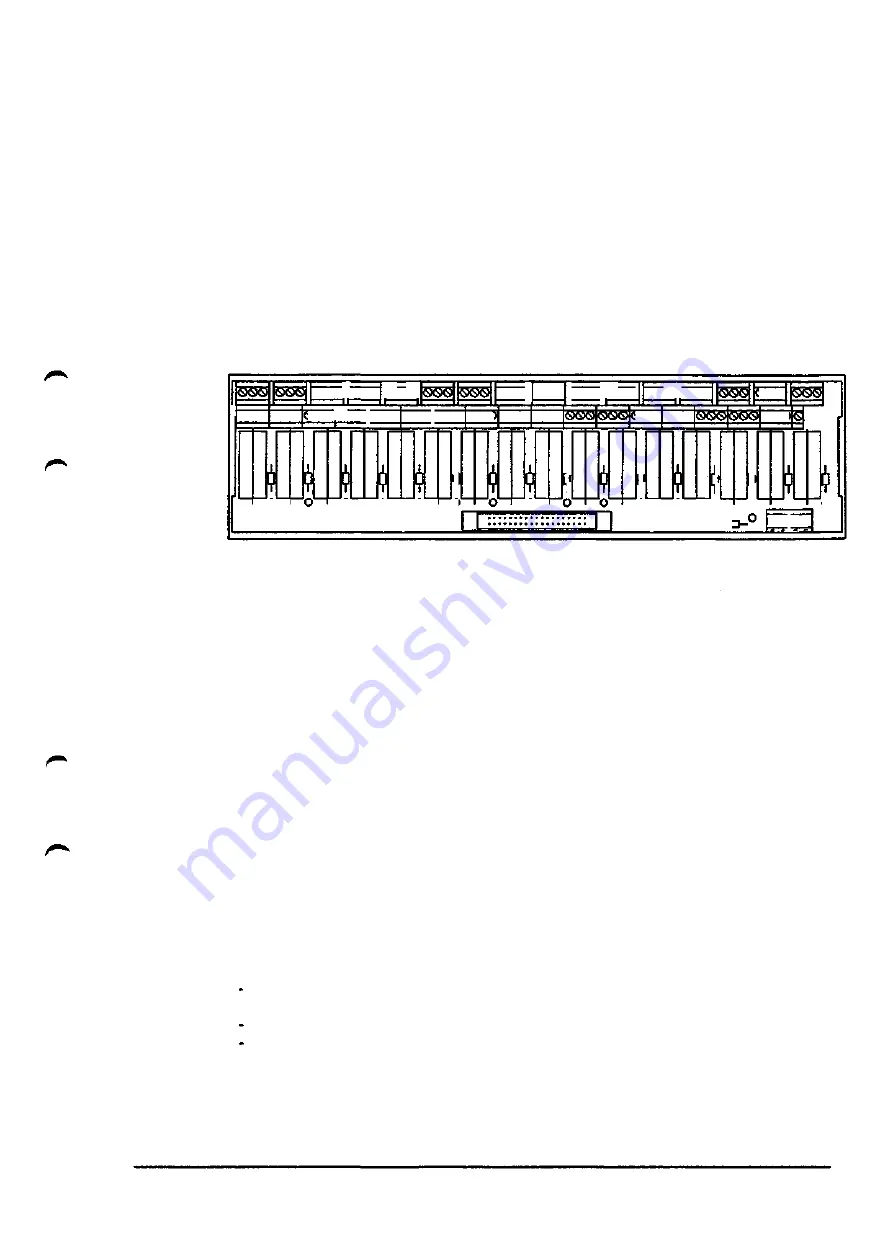
Terminal unit with 16 relay outputs.
This option can be selected alone or in combination with 34x or 36x. If the relay units are
combined with 34x or 36, they are placed after the other terminal units.
In addition, the relay unit is equipped with 10 + 10 terminals for 24 V DC supply and
8 + 8 terminal for optional supply. Max. load per terminal group 6.3 A.
Data relay unit
16 relays with one change-over contact
Maximum current
Rated voltage
outputs
4 A per relay
250 VAC
Inputs according to option 20x. T he inputs are not seperated by relays.
I OCXS ® s ®
Ho~i
GXSXsllsHSKS
bod
9G>®ta®S>j®®®
Ho nHo~i
®C9®|CXX
Ho~i
1
T
c
9®CXs
SKSXSJ
SKSXS
5 5 5
®Q®
Ho~i
J®Q®|b®6
L
r
S ssdlos®
3®S
1
r
o H
QSXS
o
L
r
H o
-c
i
r
o
SXSNS
SXSKS
o
SOJSXS
)
o
38x
Fig 6.13 Relay units
Connections from connectors
External connections via screw terminal board
All signals are connected to 64-pole contact units as per DIN 43652 with pin arrangement
as per insulation manual S3.
39x As in 38x above, but where the user establishes the pin arrangement by filling in the wiring
table 3HAB 2123-7 in conjunction with his order.
400 ADDITIONAL EQUIPMENT
The robot system can be supplied with any desired combination of additional equipment
as follows:
401 Program print-out
The print-out function makes it possible to connect a printer to the robot system for
printing:
Individual programs including TCP positions. The operator is able to
request 5 print-outs through a signal command.
The contents of the fault message buffer.
System parameters.
The robot communicates with the printer through asynchronous series transmission via an
RS 232 signal interface. This printer must be fitted with an internal buffer memory.
The connections for the printer are situated on the front of the control system,
where there is a 25-pole contact (D sub).
Description
IRB2000
51
Содержание IRB 2000
Страница 2: ...Product Manual IRB 2000 3HAB 0007 2 January 1993 M93 ABB Robotics Products Jk It It ASEA BROWN BOVERI ...
Страница 8: ...Description 1KB 2000 ...
Страница 10: ...Description 1KB 2000 ...
Страница 12: ...Description 1KB 2000 6 ...
Страница 20: ...Description 1KB 2000 14 ...
Страница 32: ...Description 1KB 2000 26 ...
Страница 40: ...5 3 2 Dimensional drawings Description 34 1KB 2000 ...
Страница 41: ..._200 _D D_ Description 35 1KB 2000 ...
Страница 44: ...Description 1KB 2000 38 ...
Страница 64: ...Description 1KB 2000 58 ...
Страница 77: ...Safety 1KB 2000 IBB 3000 12 1KB 3200 1KB 6000 ...
Страница 78: ...Installation IRB 2000 3HAB 0003 2 January 1993 M93 0 1 JIM ABB Robotics Products ASEA BROWN BOVERI ...
Страница 80: ...Installation H B 2000 ...
Страница 82: ...Installation 1KB 2000 ...
Страница 91: ...Installation 1KB 2000 12 ...
Страница 95: ...Installation 1KB 2000 16 ...
Страница 105: ...3HAB 0003 8 January 1993 M93 INSTALLATION Robot control system S3 Ml It It ABB Robotics Products ASEA BROWN BOVERI ...
Страница 110: ...INSTALLATION S3 0 4 ...
Страница 111: ...1 SAFETY INSTRUCTIONS AND RECOMMENDATIONS See separate document in the Product manual INSTALLATION S3 1 1 ...
Страница 112: ...INSTALLATION S3 1 2 ...
Страница 160: ...INSTALLATION 3 46 ...
Страница 234: ...INSTALLATION 5 70 ...
Страница 262: ...INSTALLATION S3 7 6 ...





















































