




























6.6
Adjusting synchronizing switches and absolute measurement transducers
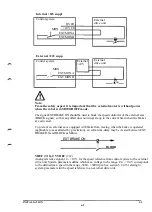
Adjusting synchronization switches
1. Run the motor to the synchronizing position.
2. When the axis moves towards the synchronizing position, the synch, switch must
be adjusted so that it closes when the motor is turned in the positive direction
(clockwise as seen from the motor drive shaft). Adjust the synchronizing switch so
that switching occurs within ±2048 resolver increments from the synchronizing
position. The switching can be seen on the programming unit, using the function
READYSYN, see section 6.5.4.1.
3. Enter MOTOR OFF mode.
4. Read the resolver position while in the synchronizing position. Note it down and
update the resolver offset (see section 5.3.5). The resolver reading in the
synchronizing position is the correct value for the synchronizing offset.
5. Repeat the above procedure for all external axes.
6. Start the system, synchronize and check synchronization positions.
Adjusting absolute measurement
1. Define the external axes as absolute measurement system.
2. Run the axis to the calibration position.
3. Enter MOTOR OFF mode.
Since the system has been defined as an absolute measurement
system, the coarse resolver will be written out on the programming unit
after the fine resolver value. Both values should be read, noted and
updated simultaneously.
4. Follow the procedure "Adjusting synchronizing switches" above, starting at paragraph 4.
INSTALLATION S3
6:22
Содержание IRB 2000
Страница 2: ...Product Manual IRB 2000 3HAB 0007 2 January 1993 M93 ABB Robotics Products Jk It It ASEA BROWN BOVERI ...
Страница 8: ...Description 1KB 2000 ...
Страница 10: ...Description 1KB 2000 ...
Страница 12: ...Description 1KB 2000 6 ...
Страница 20: ...Description 1KB 2000 14 ...
Страница 32: ...Description 1KB 2000 26 ...
Страница 40: ...5 3 2 Dimensional drawings Description 34 1KB 2000 ...
Страница 41: ..._200 _D D_ Description 35 1KB 2000 ...
Страница 44: ...Description 1KB 2000 38 ...
Страница 64: ...Description 1KB 2000 58 ...
Страница 77: ...Safety 1KB 2000 IBB 3000 12 1KB 3200 1KB 6000 ...
Страница 78: ...Installation IRB 2000 3HAB 0003 2 January 1993 M93 0 1 JIM ABB Robotics Products ASEA BROWN BOVERI ...
Страница 80: ...Installation H B 2000 ...
Страница 82: ...Installation 1KB 2000 ...
Страница 91: ...Installation 1KB 2000 12 ...
Страница 95: ...Installation 1KB 2000 16 ...
Страница 105: ...3HAB 0003 8 January 1993 M93 INSTALLATION Robot control system S3 Ml It It ABB Robotics Products ASEA BROWN BOVERI ...
Страница 110: ...INSTALLATION S3 0 4 ...
Страница 111: ...1 SAFETY INSTRUCTIONS AND RECOMMENDATIONS See separate document in the Product manual INSTALLATION S3 1 1 ...
Страница 112: ...INSTALLATION S3 1 2 ...
Страница 160: ...INSTALLATION 3 46 ...
Страница 234: ...INSTALLATION 5 70 ...
Страница 262: ...INSTALLATION S3 7 6 ...





















































