




























4.1.1 Remote control
• By using the first 8 inputs and outputs on any I/O board the following functions can
be remotely controlled:
Control Indication
(input) (output)
MOTOR ON X X
MOTOR OFF X X
Program start X X
Program stop X X
Synchronization X X
From disc X X
Lamp test X
Prog, unit lock X
Error X
Emergency stop X
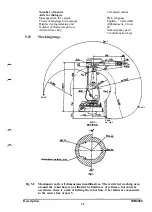
4.2 Programming unit
The programming unit (Fig. 4.2) is connected to the control system by a 10 m cable
(extension cable 10 m, total 30 m, option). When not in use, it is placed on a consol
on the door of the control system.
The programming unit is provided with LED displays and membrane buttons with
tactile feedback. The enabling device is located under the emergency stop button.
The enabling device allows the operator to switch between MOTOR ON and
MOTOR OFF when the operating mode selector is in one of the MANUAL
positions.
All operator communications, except selection of the operational mode for the
robot, are available on the portable programming unit. The programming unit is
provided with the following facilities for this purpose:
• An illuminated two-row alphanumeric display for messages in plain language.
The system can display:
- texts in any of 10 languages: English, German, French, Dutch, Italian,
Spanish, Portuguese, Japanese(Katakana) Finnish and Swedish;
- numerical values in metric or imperial.
• Five multi-function buttons below the panel.
The text on the lower row of the display defines the use of the multi-function buttons.
• Six to eight menus for most of the system functions.
Each menu contains a particular type of function, e.g. program editing.
• Joystick
The robot and the external axis are positioned using the joystick, together
with the safety pad and the switches in the upper right-hand corner.
Description 1KB 2000
16
Содержание IRB 2000
Страница 2: ...Product Manual IRB 2000 3HAB 0007 2 January 1993 M93 ABB Robotics Products Jk It It ASEA BROWN BOVERI ...
Страница 8: ...Description 1KB 2000 ...
Страница 10: ...Description 1KB 2000 ...
Страница 12: ...Description 1KB 2000 6 ...
Страница 20: ...Description 1KB 2000 14 ...
Страница 32: ...Description 1KB 2000 26 ...
Страница 40: ...5 3 2 Dimensional drawings Description 34 1KB 2000 ...
Страница 41: ..._200 _D D_ Description 35 1KB 2000 ...
Страница 44: ...Description 1KB 2000 38 ...
Страница 64: ...Description 1KB 2000 58 ...
Страница 77: ...Safety 1KB 2000 IBB 3000 12 1KB 3200 1KB 6000 ...
Страница 78: ...Installation IRB 2000 3HAB 0003 2 January 1993 M93 0 1 JIM ABB Robotics Products ASEA BROWN BOVERI ...
Страница 80: ...Installation H B 2000 ...
Страница 82: ...Installation 1KB 2000 ...
Страница 91: ...Installation 1KB 2000 12 ...
Страница 95: ...Installation 1KB 2000 16 ...
Страница 105: ...3HAB 0003 8 January 1993 M93 INSTALLATION Robot control system S3 Ml It It ABB Robotics Products ASEA BROWN BOVERI ...
Страница 110: ...INSTALLATION S3 0 4 ...
Страница 111: ...1 SAFETY INSTRUCTIONS AND RECOMMENDATIONS See separate document in the Product manual INSTALLATION S3 1 1 ...
Страница 112: ...INSTALLATION S3 1 2 ...
Страница 160: ...INSTALLATION 3 46 ...
Страница 234: ...INSTALLATION 5 70 ...
Страница 262: ...INSTALLATION S3 7 6 ...





















































