




























I/O map
The system is supplied as standard with the above configuration.
By using an I/O map inputs and outputs can be individually allocated an optional channel
("mapping") to adapt I/O to the installation.
For further information regarding I/O mapping, see the installation manual for S3.
I/O ports
Series and parallel I/O are available and can be activated from the user program when
necessary.
When they are not activated as ports, they operate as individual inputs and outputs.
Series ports
Input port
Design:
Requirement:
Location:
Output port
Design:
Requirement:
Location:
4 parallel input channels for 16-bit data words.
4 outputs for control data
2 out + 1 in for hand-shake routines.
6 outputs/5 inputs
Output 1-6 and input 1-5
4 parallel output channels for 16-bit data words
2 out + 1 in for hand-shake routines.
6 outputs/1 input
Output 1-6 and input 5
227
Parallel I/O ports
4-bit I/O ports
Quantity:
Location:
8-bit I/O ports
Quantity:
Location:
Analogue I/O unit
(with common 0 V)
Inputs:
Outputs:
2 in and 2 out.
Input/output 1-4 and 13-16.
2 in and 2 out
Input/output 17-24 and 25-32
2 with switching frequency = 10 Hz for the input filter
2 with switching frequency = 100 Hz for the input filter
Data:
Input impedance
Input voltage
Resolution
Accuracy
3 voltage outputs
Output voltage
Load
Resolution
Accuracy
1 Mohm
±10 V
10 mV (10/1024 V)
15 mV + 0.2% of
input voltage
±10 V
>2 kohm
10 mV (10/1024 V)
25 mV + 0.5% of
output voltage
Description
45
ntB2000
Содержание IRB 2000
Страница 2: ...Product Manual IRB 2000 3HAB 0007 2 January 1993 M93 ABB Robotics Products Jk It It ASEA BROWN BOVERI ...
Страница 8: ...Description 1KB 2000 ...
Страница 10: ...Description 1KB 2000 ...
Страница 12: ...Description 1KB 2000 6 ...
Страница 20: ...Description 1KB 2000 14 ...
Страница 32: ...Description 1KB 2000 26 ...
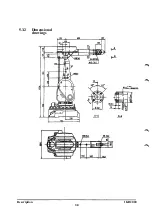
Страница 40: ...5 3 2 Dimensional drawings Description 34 1KB 2000 ...
Страница 41: ..._200 _D D_ Description 35 1KB 2000 ...
Страница 44: ...Description 1KB 2000 38 ...
Страница 64: ...Description 1KB 2000 58 ...
Страница 77: ...Safety 1KB 2000 IBB 3000 12 1KB 3200 1KB 6000 ...
Страница 78: ...Installation IRB 2000 3HAB 0003 2 January 1993 M93 0 1 JIM ABB Robotics Products ASEA BROWN BOVERI ...
Страница 80: ...Installation H B 2000 ...
Страница 82: ...Installation 1KB 2000 ...
Страница 91: ...Installation 1KB 2000 12 ...
Страница 95: ...Installation 1KB 2000 16 ...
Страница 105: ...3HAB 0003 8 January 1993 M93 INSTALLATION Robot control system S3 Ml It It ABB Robotics Products ASEA BROWN BOVERI ...
Страница 110: ...INSTALLATION S3 0 4 ...
Страница 111: ...1 SAFETY INSTRUCTIONS AND RECOMMENDATIONS See separate document in the Product manual INSTALLATION S3 1 1 ...
Страница 112: ...INSTALLATION S3 1 2 ...
Страница 160: ...INSTALLATION 3 46 ...
Страница 234: ...INSTALLATION 5 70 ...
Страница 262: ...INSTALLATION S3 7 6 ...





















































