

























Note
Action
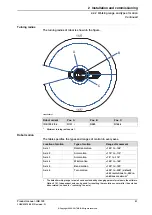
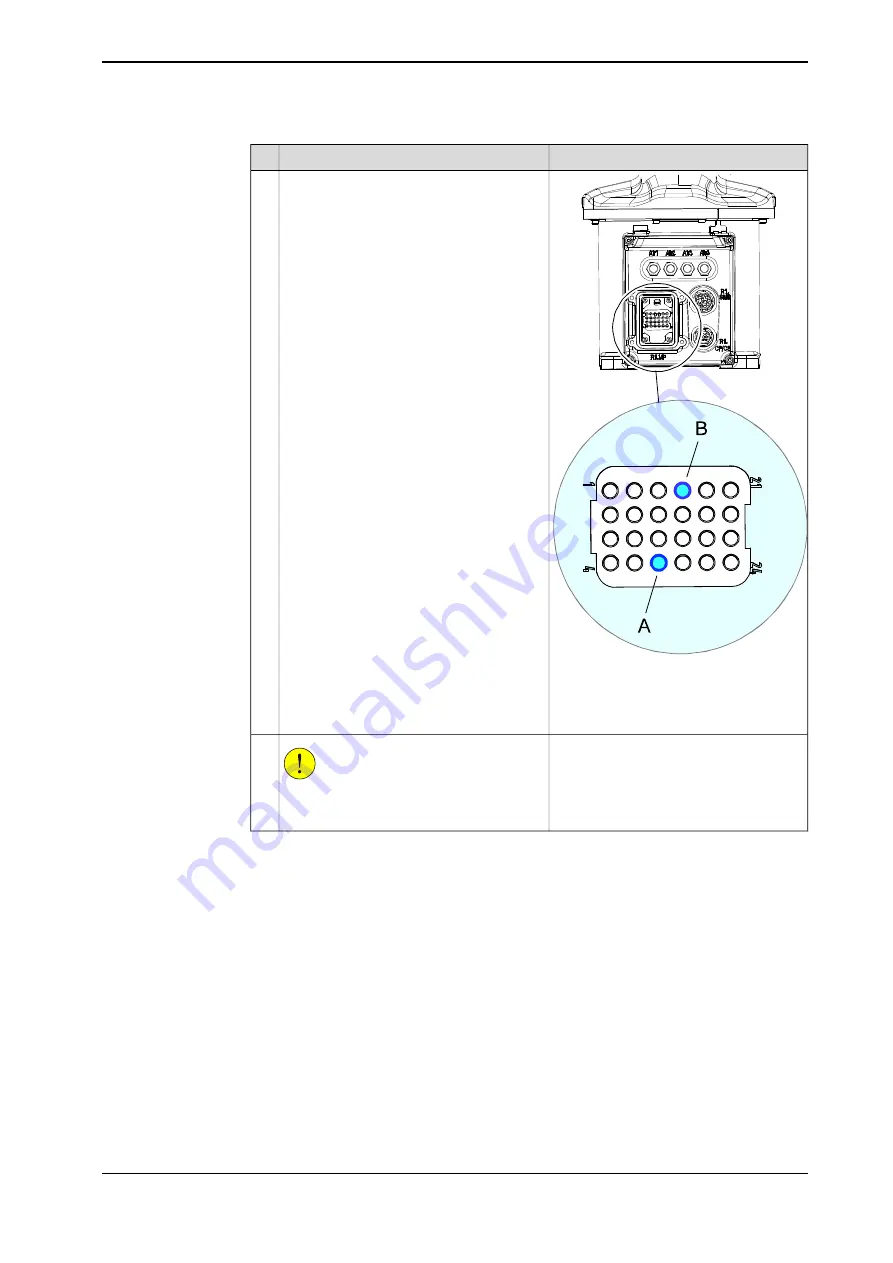
xx0900000638
Connect an external 24VDC power supply
to connector R1.MP on the robot base.
2
Connect to connector R1.MP:
•
A: 0V to pin 12
•
B: 24V to pin 13
CAUTION
The holding brakes are released to all axes
when power is connected to the pins.
3
Product manual - IRB 120
69
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.3.2 Manually releasing the brakes
Continued
Содержание IRB 120
Страница 1: ...ROBOTICS Product manual IRB 120 ...
Страница 2: ...Trace back information Workspace R17 2 version a11 Checked in 2017 09 20 Skribenta version 5 1 011 ...
Страница 8: ...This page is intentionally left blank ...
Страница 90: ...This page is intentionally left blank ...
Страница 114: ...This page is intentionally left blank ...
Страница 224: ...This page is intentionally left blank ...
Страница 250: ...This page is intentionally left blank ...
Страница 254: ...This page is intentionally left blank ...
Страница 264: ...This page is intentionally left blank ...
Страница 270: ......
Страница 271: ......































































