





























Motor axis 4
C
Cable harness
D
Motor axis 3
E
Motor axis 2
F
Plate (part of the cable harness)
G
Motor axis 1
H
Required equipment
Note
Equipment
The content is defined in the section
Standard toolkit
These procedures include references to the tools
required.
Other tools and procedures may be re-
quired. See references to these proced-
ures in the step-by-step instructions be-
low.
for example Loctite 574
Flange sealant
Shell Alvania Grease WR2
Cable grease
Mobil FM222. Used for lubrication of cable con-
tact areas for robots with food grade lubrication.
Cable grease, for food grade lubrication
Removing the cable harness in the
wrist
Information
Action
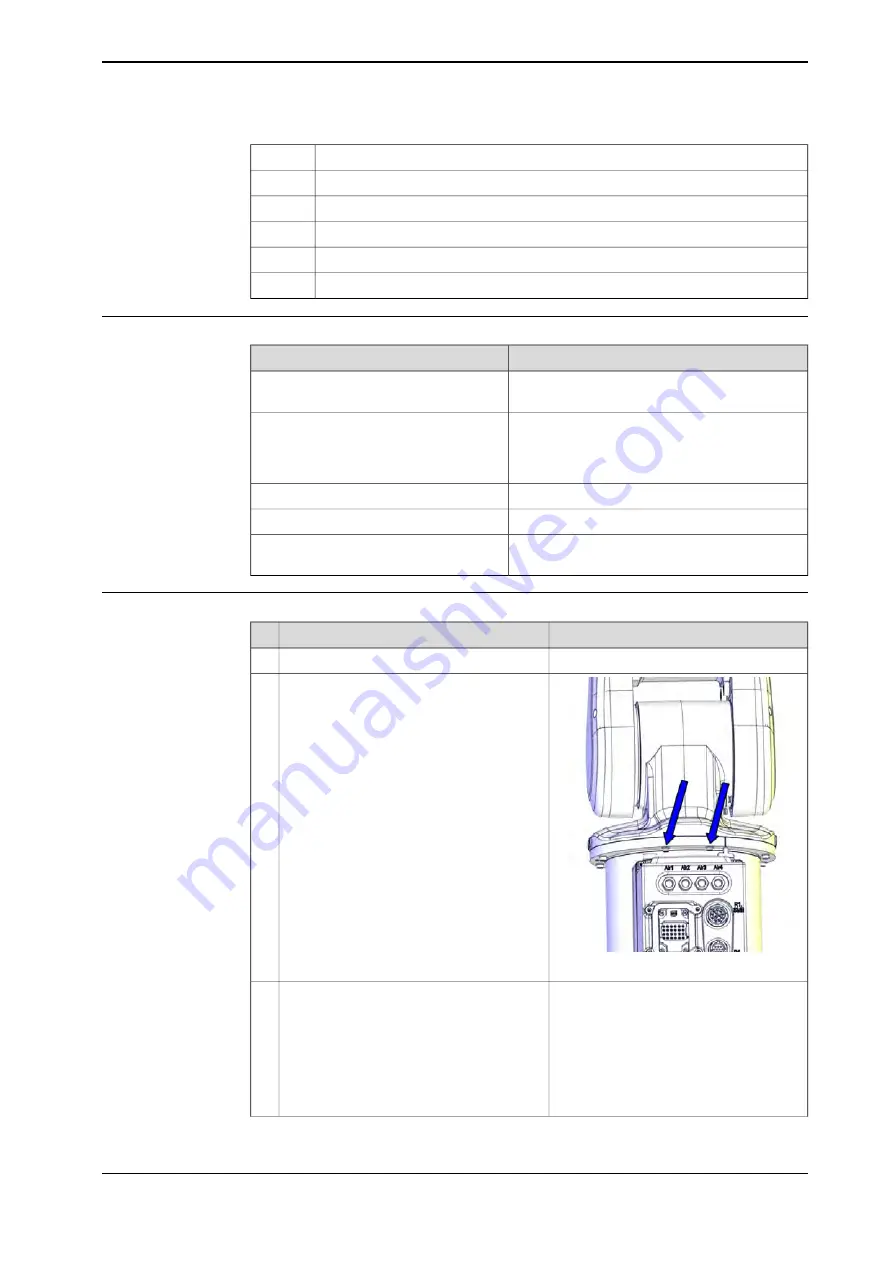
Jog axis 1 to 90° position.
1
xx1300001598
Unscrew
two attachment screws
securing
the swing housing to the base, not possible
to reach with axis 1 in 0° position.
2
Jog
•
axis 1 to 0° position
•
axis 2 to -50° position
•
axis 3 to +50° position
•
axis 4 to 0° position
•
axis 5 to +90° position
•
axis 6 - no significance
3
Continues on next page
Product manual - IRB 120
121
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
4 Repair
4.3.1 Removing the cable harness
Continued
Содержание IRB 120
Страница 1: ...ROBOTICS Product manual IRB 120 ...
Страница 2: ...Trace back information Workspace R17 2 version a11 Checked in 2017 09 20 Skribenta version 5 1 011 ...
Страница 8: ...This page is intentionally left blank ...
Страница 90: ...This page is intentionally left blank ...
Страница 114: ...This page is intentionally left blank ...
Страница 224: ...This page is intentionally left blank ...
Страница 250: ...This page is intentionally left blank ...
Страница 254: ...This page is intentionally left blank ...
Страница 264: ...This page is intentionally left blank ...
Страница 270: ......
Страница 271: ......






































































