

























2.3.3 Orienting and securing the robot
Introduction
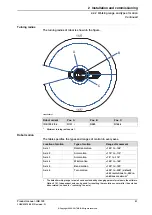
This section details how to orient and secure the robot to the foundation or base
plate in order to run the robot safely. The requirements made on the foundation
are shown in sections:
•
Loads on foundation, robot on page 57
•
Requirements, foundation on page 58
.
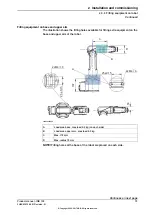
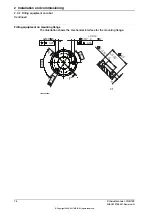
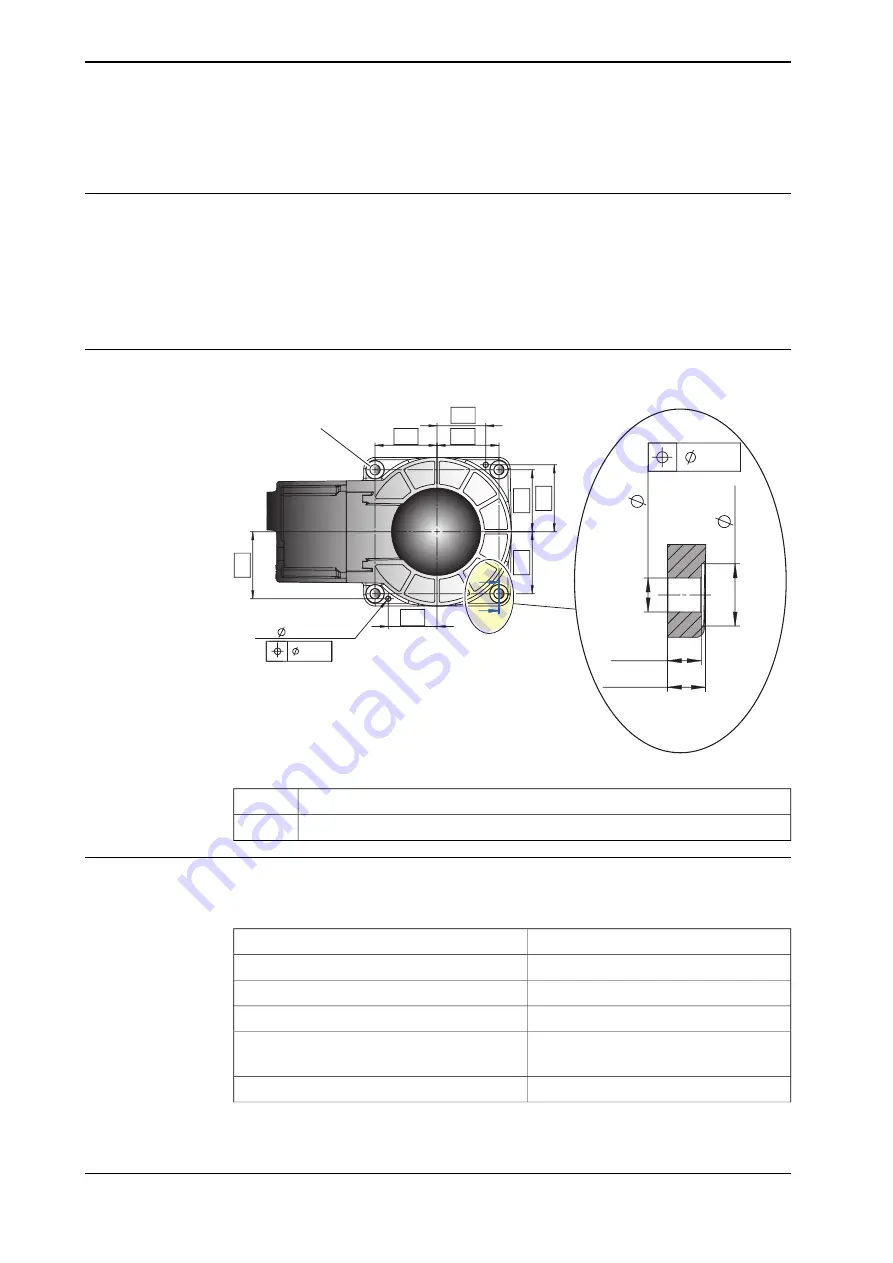
Hole configuration, base
The illustration shows the hole configuration used when securing the robot.
0.5
E-E
4x
22
12
12
4x
4x
4x14.3
0.15
2x
75
+0.018
6
59
0
H8
81
81
75
75
75
59
A
B
E
E
xx0900000162
Holes for attachment screws (4 pcs)
A
Holes for pins (2 pcs)
B
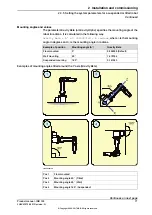
Specification, attachment screws and pins
The table specifies the type of securing screws and washers to be used to secure
the robot directly to the foundation. It also specifies the type of pins to be used.
M10x25
Suitable screws
4 pcs
Quantity
8.8-A3F
Quality
10 mm
Suitable washer
2 pcs, D6x20
Guide pins
ISO 2338-6 m6x30 - A1
35 Nm
Tightening torque
Continues on next page
70
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.3.3 Orienting and securing the robot
Содержание IRB 120
Страница 1: ...ROBOTICS Product manual IRB 120 ...
Страница 2: ...Trace back information Workspace R17 2 version a11 Checked in 2017 09 20 Skribenta version 5 1 011 ...
Страница 8: ...This page is intentionally left blank ...
Страница 90: ...This page is intentionally left blank ...
Страница 114: ...This page is intentionally left blank ...
Страница 224: ...This page is intentionally left blank ...
Страница 250: ...This page is intentionally left blank ...
Страница 254: ...This page is intentionally left blank ...
Страница 264: ...This page is intentionally left blank ...
Страница 270: ......
Страница 271: ......





































































