





























Information
Action
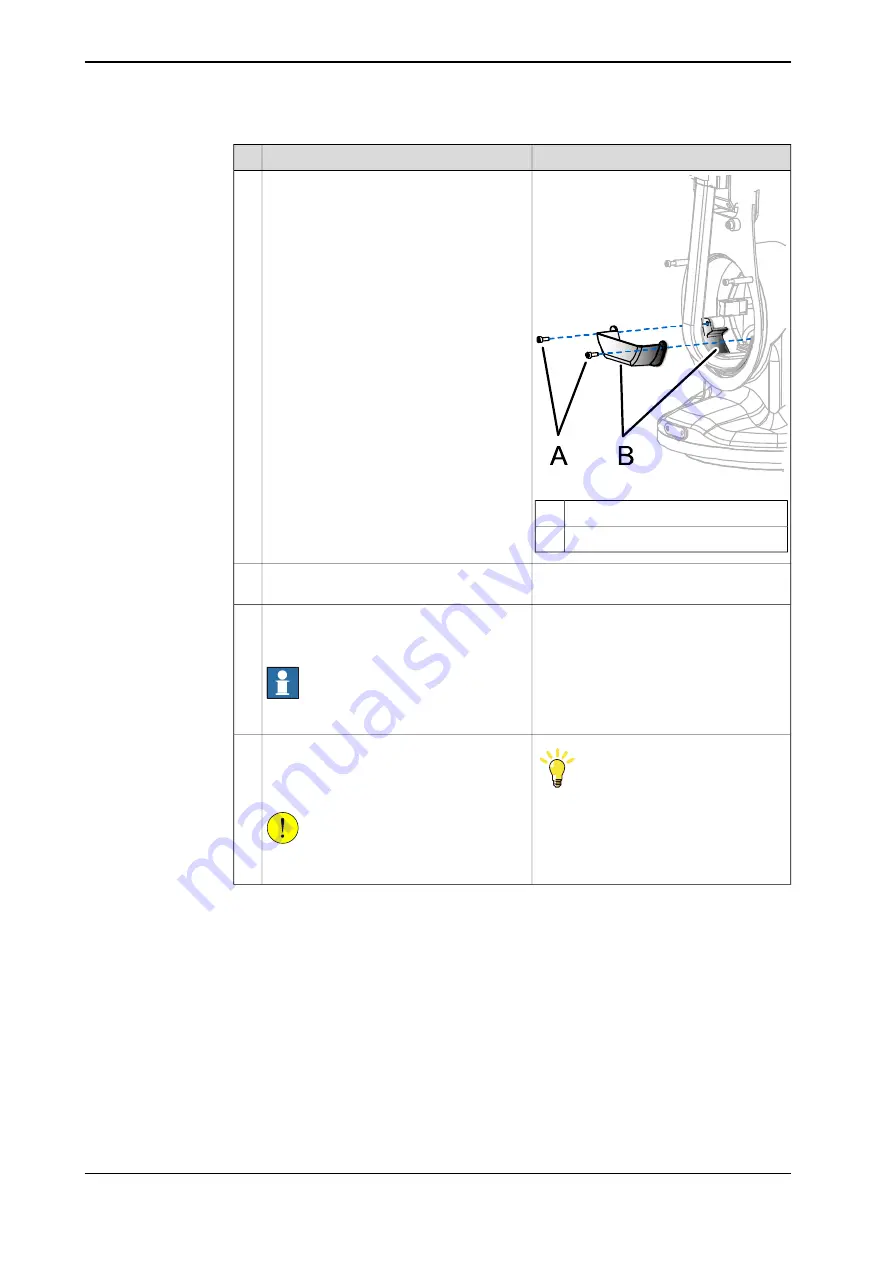
xx0900000857
Attachment screws (2 pcs)
A
Cable guides (2 pcs)
B
Remove both
cable guides
.
7
Carefully pull the axis 2 motor cables out
as long as possible.
8
Guide the cable harness and carefully
push/pull it in below motor in axis2, as long
as possible, without damaging any cables.
Note
Do not use excessive force!
9
Tip
Use a solid box in a suitable size made of
a material that will not damage the robot
in any way. Some plastic in the bottom of
the box makes a good "bed" for the robot
to rest on.
Carefully
lift the upper arm, lower arm, and
swing housing
and put it down close to the
base of the robot as far as the (still connec-
ted) cable harness permit.
CAUTION
Do not stretch the cable harness.
10
Continues on next page
174
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
4 Repair
4.7.1 Replacing axis-1 motor with gearbox
Continued
Содержание IRB 120
Страница 1: ...ROBOTICS Product manual IRB 120 ...
Страница 2: ...Trace back information Workspace R17 2 version a11 Checked in 2017 09 20 Skribenta version 5 1 011 ...
Страница 8: ...This page is intentionally left blank ...
Страница 90: ...This page is intentionally left blank ...
Страница 114: ...This page is intentionally left blank ...
Страница 224: ...This page is intentionally left blank ...
Страница 250: ...This page is intentionally left blank ...
Страница 254: ...This page is intentionally left blank ...
Страница 264: ...This page is intentionally left blank ...
Страница 270: ......
Страница 271: ......




































































