





























II K 4-74
Overview of Software
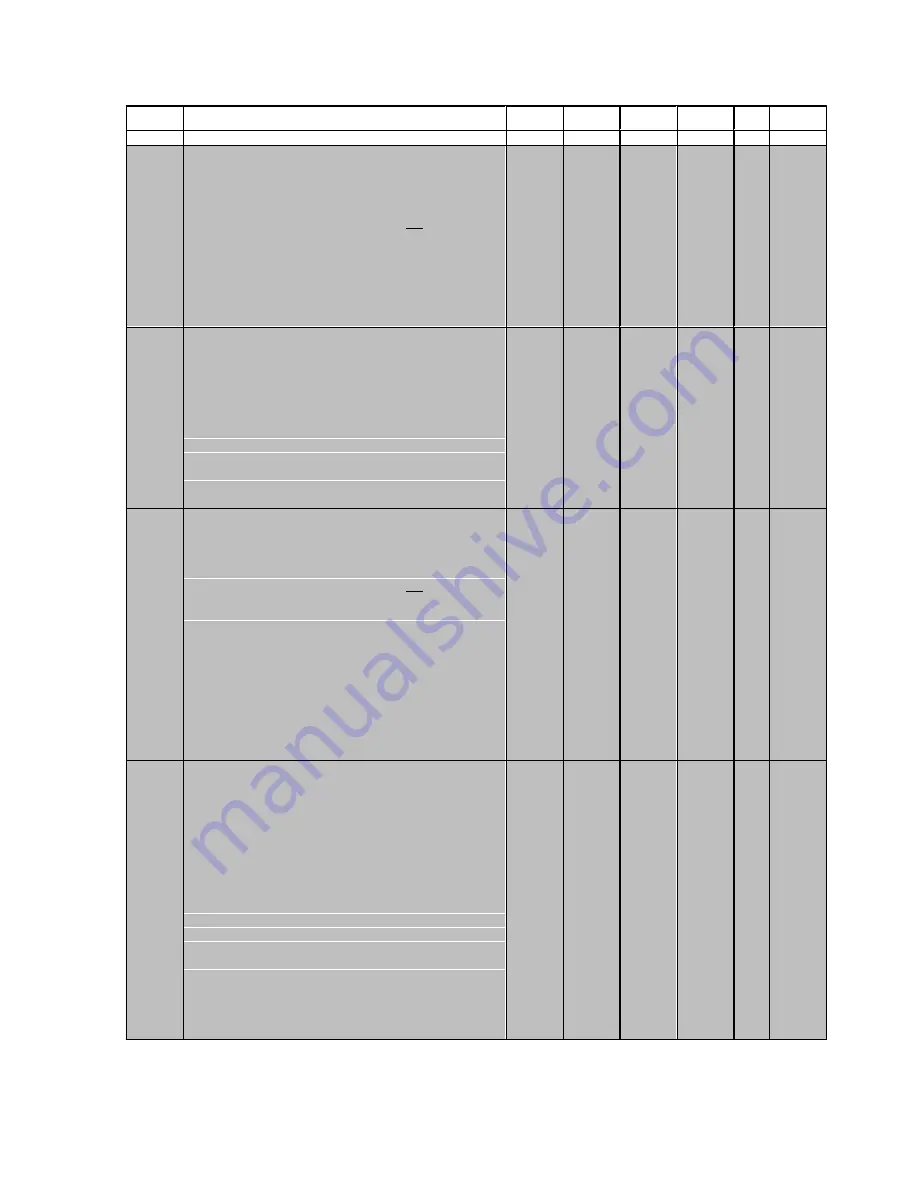
ParNo.
Parameter name and significance
Min
Max
Default
Unit
(1)
custom.
setting
Grp 9
Macro Adaptation (continued)
9.10
MotPot Incr
MotorPot Increase speed function will be controlled
from a binary signal which is assigned in this
parameter.
Assignment identical with 9.05
only effective if
MotPot Decr (9.11)
is not set to
1 = Disable
State of binary signal:
0=hold speed
1=increase speed
accelerate speed at Acel Ramp (5.09 ) until
Max Speed (1.06)
0
10
0
Text
x
9.11
MotPot Decr
MotorPot Decrease speed function will be controlled
from a binary signal which is assigned in this
parameter.
Assignment identical with 9.05
State of binary signal:
0=hold speed
1=decrease speed
decelerate speed at Decel Ramp (5.10) until
zero
speed respectively MotPotMinSpeed (9.12)
if active. MotPot Decr has precedence
above MotPot Incr
0
10
0
Text
x
9.12
MotPotMinSpeed
MotorPot minimum speed function will be controlled
from a binary signal which is assigned in this
parameter.
Assignment identical with 9.05
only effective if
MotPot Decr (9.11)
is not set to
1 = Disable
State of binary signal:
0=Start from zero.
MotPotMinSpeed is inactive.
1=Start from MotPotMinSpeed
activate MinimumSpeed. Speed can be
defined in parameter Fixed Speed 1 (5.13).
When the drive is started the speed will be
accelerated to this minimum speed and it is
not possible to set the speed below this
minimum with motor pot function.
0
10
0
Text
x
9.13
Ext Field Rev
External field reversal will be controlled from a binary
signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0=no field reversal
1=field reversal
External field reversal with external field
reversing switch.
Only for 2-Q application.
Depend on field reversal the signal „Field
reversal active“ has log. state „1“.
Field reversal is only possible when the
drive is OFF (DI7=0). When field reversal is
active the polarity of speed actual value is
changed in the software. It’s recommended
to use a remanence contactor relay to store
the state of this relay when the main supply
failes. Otherwise the relay contactors can
burn due to the field inductance.
0
10
0
Text
x
(1) no changes possible if the drive is in ON-status
Содержание DCS 400
Страница 1: ...II K 1 1 DCS Thyristor power converter for DC drive systems 20 to 1000 A 9 to 522 kW Manual DCS 400 ...
Страница 24: ...II K 3 14 Technical data ...
Страница 29: ...II K 4 5 Overview of Software ...
Страница 158: ...II K 6 36 Operating Instructions ...
Страница 181: ...II K B 1 Appendix B Declaration of conformity ...
Страница 190: ...Notices ...
Страница 191: ...Notices ...





















































