


























12
Note:
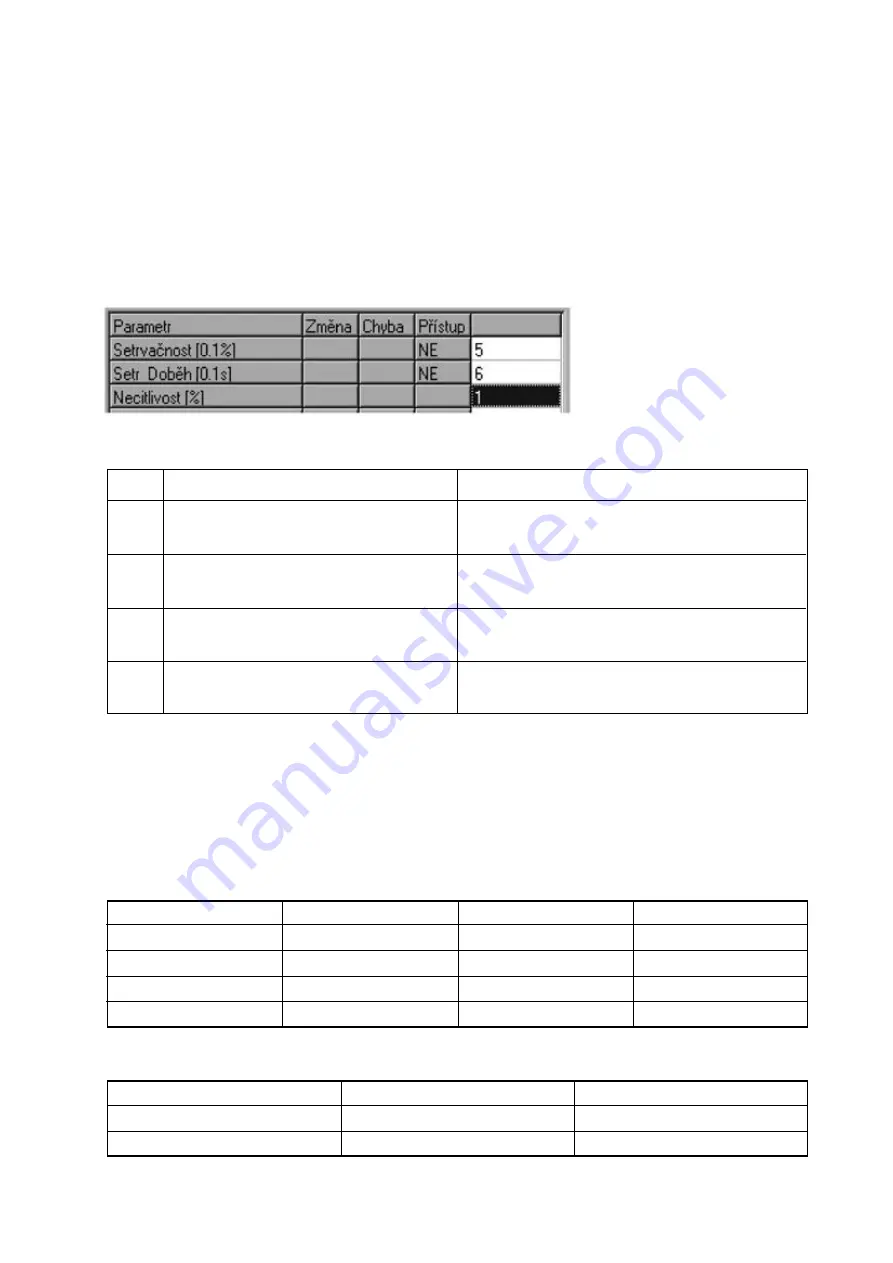
In the window “Parameters” of the setting program, column “Access”, the word “NO” designates
parameters that cannot be changed by the user (change of these parameters is blocked).
For actuator with
DMS2 ED electronic system in “Replacement of electro-mechanical board“ design
have two contacts function of
torque switches, two contacts function of position switches and two contacts can
be used according to the customer requirements according to the list below
(typically a function of signalling
switches).
In version
CONTROL have two contacts function of motor relay
(they control the actuator in “open“ and
“close“ position by comparison result of the output shaft of the actuator and input signal),
two contacts have
function of
torque switches or position switches according to setting, two contacts are available to
the customer.
Relay MO, MZ, SO, SZ
In the version Control, the function of relay
MO/MZ is same as that of motor relays.
Their operation is controlled by:
–
regulation loop
(deviation of required and actual position)
–
active errors
Any induced active error will change over both relays to a standstill position
(coils not energized).
In case of
errors, the relays with a function of torque relays
(in both versions DMS2 ED and DMS2 ED Control)
are also
controlled.
List of functions that can be selected for signalling contacts SO, SZ:
off
torque and position O
position
torque O or Z
position O
torque and position Z
position negated
position Z
opening
control – local
torque O
closing
control – remote
torque Z
movement
control – off
Ready contact relays for errors signalling and non-standard states according to the following list:
off
wa errors
torque O or Z
warning
not remote
errors
wa not remote
MO
torque open
(also changes-over to errors)
motor open
MZ
torque closed
(also changes-over to errors)
motor closed
PO
position open
torque open
(also changes-over to errors )
+ optional tripping in position open (parameter Tripping)
PZ
position closed
torque closed
(also changes-over to errors )
+ optional tripping in position closed (parameter Tripping)
Relay
DMS2 ED
DMS2 ED Control
Parametr – Parameter
Změna – Change
Chyba – Error
Přístup – Access
Setrvačnost
(0,1 %)
– Inertia [0.1 %]
Setr. Doběh
(0,1 s)
– Inertial run-out [0.1 s]
Necitlivost
(%)
– Insensitivity [%]
NE – NO







































































