


























44
ZABER TECHNOLOGIES INC.
16.2.1. Download
1. Download the driver here: Zaber Integrated USB Driver.
2. Extract the files to a handy location: Downloads, My Documents or the Desktop are good
places.
3. Connect power to the controller and connect the USB cable from the controller to the
computer.
4. Follow the additional steps for your version of Windows.
16.2.2. Windows Vista, 7 & 8
1. Windows will detect the device connection and attempt to automatically install drivers.
After a minute or so this will fail with a message that the device is not working correctly.
Continue on with the steps below.
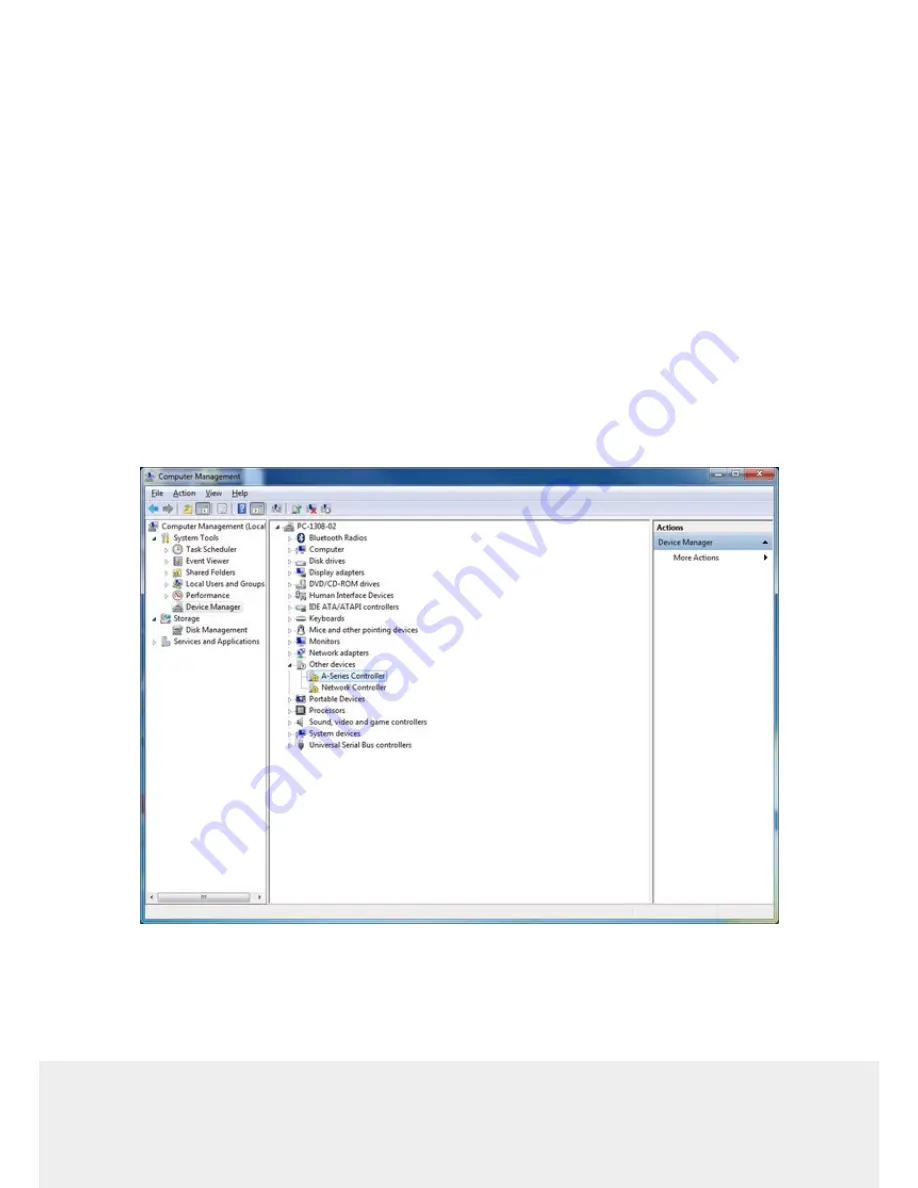
2. Right click on My Computer and select Manage.
3. Select Device Manager from the list on the left. Under 'Other devices', you should see an
entry with the name of the Zaber controller that is connected.
4. Right click on this entry and select 'Update Driver Software...'