





























2.4
Conducting a Test Run
39
2.4.2 Step 1: Conducting a Test Run for Motor without Load
Check that the motor is wired correctly.
If the motor fails to rotate properly during a servo drive test run, the cause most frequently lies
in incorrect wiring.
Conduct a test run for the motor without load according to the procedure described below.
For customers who use a servomotor with brake, refer to
Section 2.4.4 Supplemental In-
formation on Test Run
before starting a test run.
Operate the motor with
a Digital Operator.
Check wiring.
Do not connect to the machine.
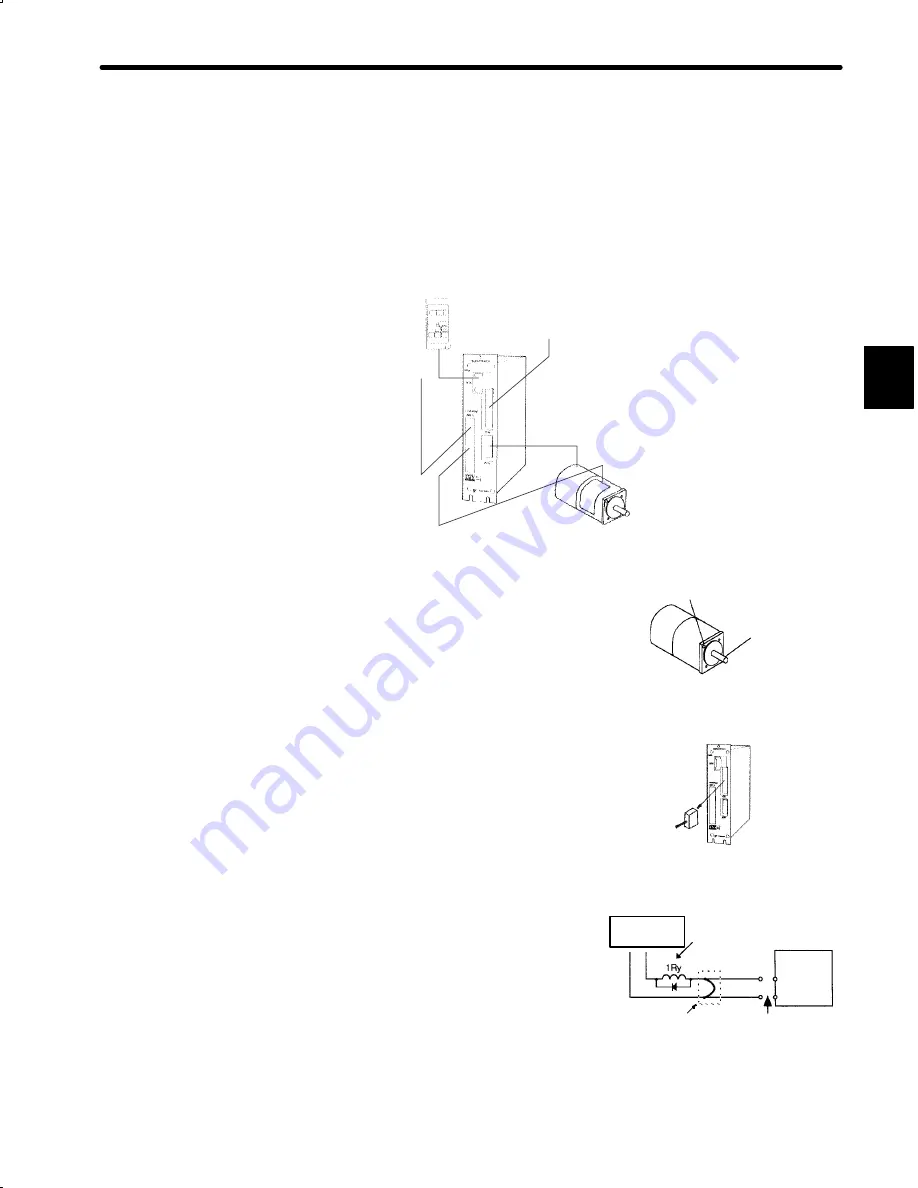
(1) Secure the servomotor.
Secure the servomotor to mounting holes to
prevent it from moving during operation. Alter-
natively, install the servomotor on the machine
and disconnect couplings and belts.
(2) Disconnect connector 1CN, then check the
motor wiring in the power supply circuit.
(When incremental encoder is used)
I/O signals (1CN) are not to be used so leave
connector 1CN disconnected.
(When absolute encoder is used)
Connect the battery to the battery terminals
1CN-21, -22.
(3) Short the alarm signal circuit.
Because connector 1CN is disconnected, the
alarm signal prevents the power supply circuit
from being turned ON. Therefore, temporarily
short the alarm signal circuit.
2
Secure servomotor to mounting holes.
Do not connect
anything to the
motor shaft
(no-load
status).
Disconnect
connector
1CN
Power supply
0V +24V
Force this relay ON.
Short this
circuit.
1CN disconnected
ALM+
ALM-
(1CN
−
31)
(1CN
−
32)