





























LIST OF USER CONSTANTS
468
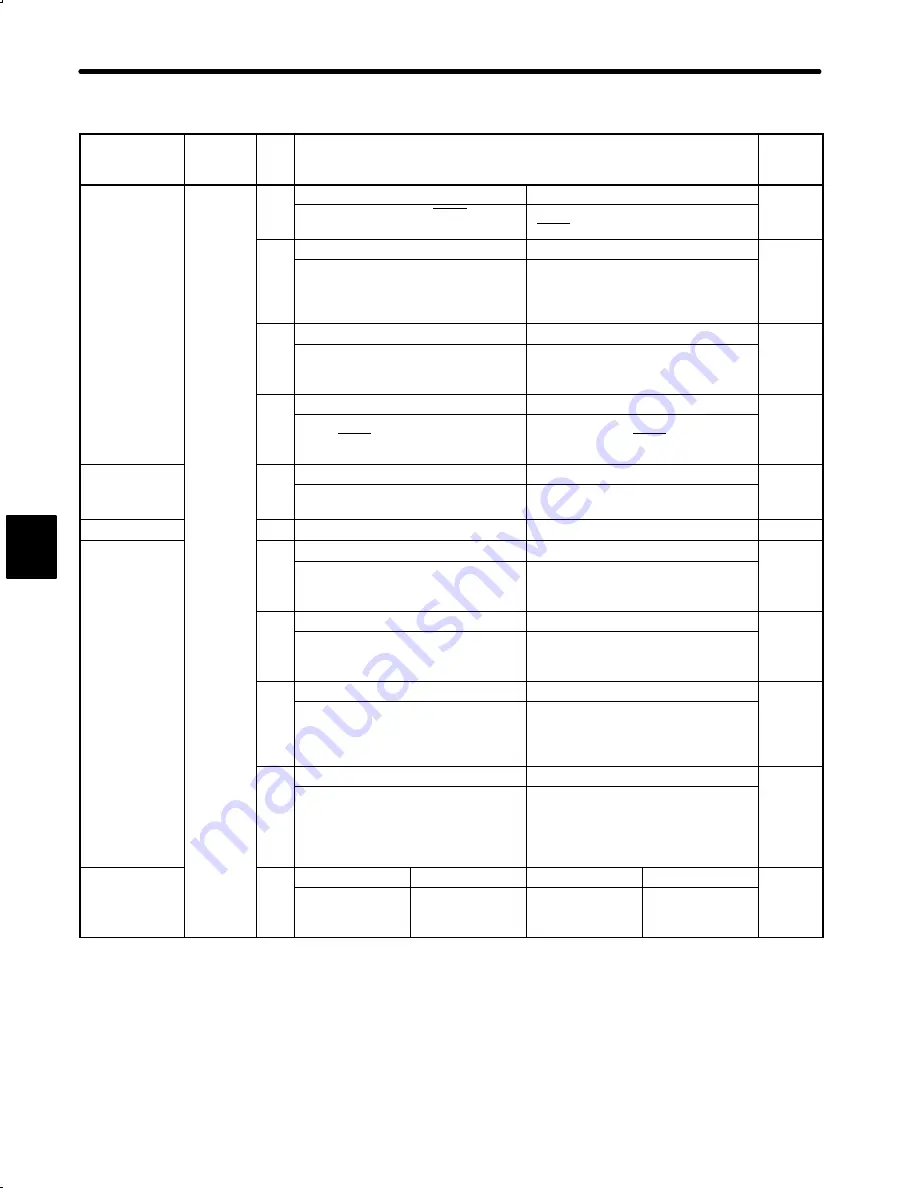
List of User Constants (Memory Switch Setting)
User
Constant
No.
Bit
No.
Setting
Factory
Setting
Input signal
bl /di bl
Cn-01
0
0
1
0
p
g
enable/disable
Uses servo ON input (S-ON).
Does not use servo ON input
(S-ON). Servo is always ON.
1
0
1
0
Uses SEN signal input (SEN) when
absolute encoder is used.
Does not use SEN signal input
(SEN) when absolute encoder is
used. Servopack automatically
treats signal voltage as high level.
2
0
1
0
Uses forward rotation prohibited
input (P-OT).
Does not use forward rotation
prohibited input (P-OT). Forward
rotation is always possible.
3
0
1
0
Uses reverse rotation prohibited
input (N-OT).
Does not use reverse rotation
prohibited input (N-OT). Reverse
rotation is always possible.
CLT signal
i hi
4
0
1
0
g
switching
Uses CLT signal (CLT) as torque
limit detection output.
Uses CLT signal (CLT) as speed
coincide output.
−
5
Not used.
Not used
0
Sequence
l
i
6
0
1
0
q
selection at
alarm condition
Stops the motor by applying
dynamic brake when an alarm
arises.
Causes the motor to coast to a stop
when an alarm arises.
7
0
1
1
When an alarm arises, stops the
motor by applying dynamic brake
and then releases dynamic brake.
When an alarm arises, stops the
motor by applying dynamic brake
but does not release dynamic brake.
8
0
1
0
Stops the motor according to bit 6
setting when overtravel is detected
(P-OT, N-OT).
Decelerates the motor to a stop by
applying the torque specified in
Cn-06 when overtravel is detected
(P-OT, N-OT).
9
0
1
0
When overtravel is detected (P-OT,
N-OT), decelerates the motor to a
stop by applying the torque specified
in Cn-06 and then turns the servo
OFF.
When overtravel is detected (P-OT,
N-OT), decelerates the motor to a
stop by applying the torque specified
in Cn-06 and then performs
zero-clamp.
Control mode
l
i
B
•
A 0
•
0
0
•
1
1
•
0
1
•
1
0
•
0
selection
Speed control
Speed control
with zero-clamp
function
Torque control I
Torque control II
D