





























APPLICATIONS OF
Σ
-SERIES PRODUCTS
3.2.6
Using Contact Input Speed Control
cont.
90
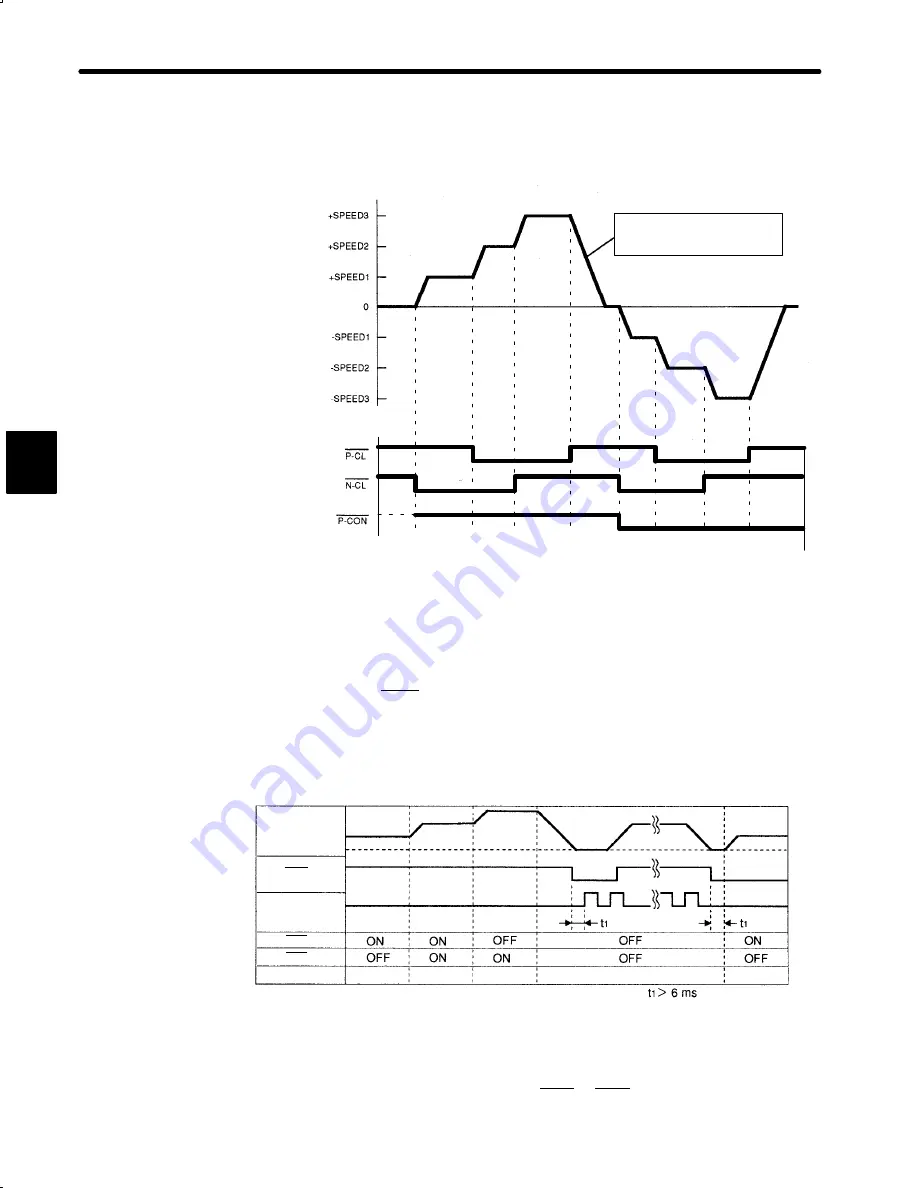
4) The figure below illustrates an example of operation in contact input speed control mode.
Using the soft start function reduces physical shock at speed changeover.
When Contact Input Speed Control is Used
Motor speed
Stopped
1st speed
2nd speed
3rd speed
Set acceleration and
deceleration values in Cn-07
and Cn-23 (soft start time).
Stopped
1st speed
2nd speed
3rd speed
Stopped
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
ON
ON
ON
ON
ON
ON
Note
For the position control, the soft start function is available only when contact input
speed control is used. The soft start function is not available when pulse reference
input is used.
For the position control type, if contact input speed control mode is switched to
pulse reference input mode when the motor is running at the 1st, 2nd or 3rd
speed, the Servopack does not receive a pulse reference until positioning com-
plete signal COIN is output.
Always start outputting a pulse reference from the host controller after a position-
ing complete signal is output from the Servopack.
Signal Generation Timing for Position Control Type
Motor speed
0 r/min
Pulse reference
Selected speed
1st speed
2nd speed
3rd speed
Pulse reference
COIN
N-CL
P-CL
1st speed
The above figure illustrates signal generation timing when the soft start function is
used.
The value of t
1
is not influenced by use of the soft start function.
A maximum of 6 ms delay occurs when P-CL or N-CL signal is read.
3