





























CLS200 Series User’s Guide
Chapter 7: Turning and Control
133
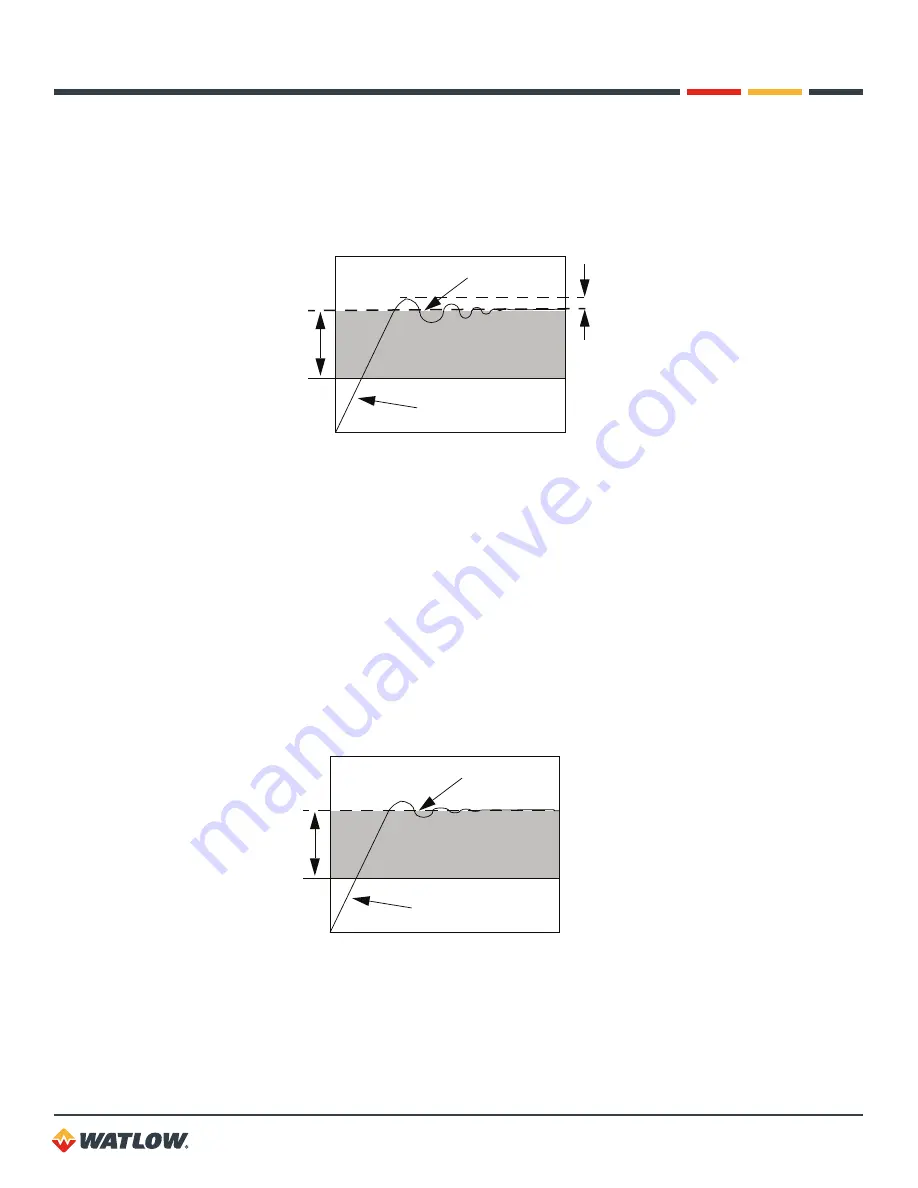
Proportional and Integral Control
With proportional and integral control, the integral term corrects for offset by repeating the
proportional band’s error correction until there is no error. For example, if a process tends to settle
about 5°F below the setpoint, appropriate integral control brings it to the desired setting by gradually
increasing the output until there is no deviation.
Proportional
Setpoint
Process Variable
Band
Over-
shoot
Figure 7.3
— Proportional and Integral Control
Proportional and integral action working together can bring a process to setpoint and stabilize it.
However, with some processes the user may be faced with choosing between parameters that
make the process very slow to reach setpoint and parameters that make the controller respond
quickly, but introduce some transient oscillations when the setpoint or load changes. The extent to
which these oscillations of the process variable exceed the setpoint is called
overshoot
.
Proportional, Integral and Derivative Control
Derivative control corrects for overshoot by anticipating the behavior of the process variable and
adjusting the output appropriately. For example, if the process variable is rapidly approaching the
setpoint from below, derivative control reduces the output, anticipating that the process variable will
reach setpoint. Use it to reduce overshoot and oscillation of the process variable common to PID
control.
Figure 7.4
shows a process under full PID control.
Proportional
Setpoint
Process Variable
Band
Figure 7.4
— Proportional, Integral and Derivative Control





















































