





























vacon • 92
Parameters
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
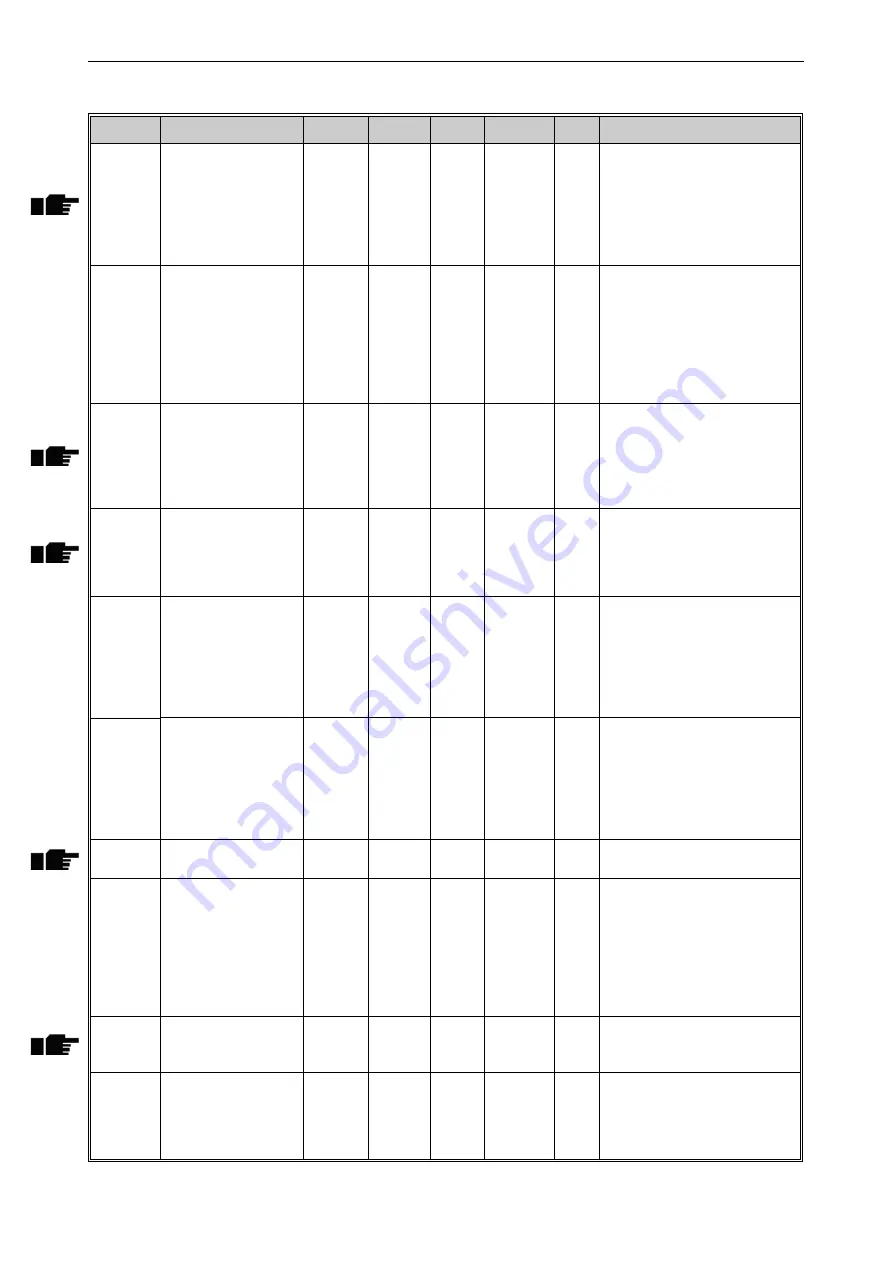
P3.1.2.4
0
1
0
631
The automatic motor identifica-
tion calculates or measures the
motor parameters that are
needed for optimum motor and
speed control.
0 = No action
1 = At standstill
P3.1.2.5
Magnetizing current
0.0
2*IH
A
0.0
612
Motor magnetizing current (no-
load current). The values of the
U/f parameters are identified by
the magnetizing current if given
before the identification run. If
this value is set to zero, magne-
tizing current will be internally
calculated.
P3.1.2.6
0
1
0
653
Enabling this function prevents
the drive from tripping when the
motor switch is closed and
opened e.g. using flying start.
0 = Disabled
1 = Enabled
P3.1.2.7
0.00
50.00
%
0.00
620
The drooping function enables
speed drop as a function of load.
Drooping will be defined in per-
cent of nominal speed at nomi-
nal load.
P3.1.2.8
Load drooping time
0.00
2.00
s
0.00
656
Load drooping is used in order
to achieve a dynamic speed
drooping because of changing
load. This parameter defines the
time during which the speed is
restored to the level it was
before the load increase.
P3.1.2.9
Load drooping mode
0
1
0
1534
0 = Normal; Load drooping fac-
tor is constant through the
whole frequency range
1 = Linear removal; Load droop-
ing is removed linearly from
nominal frequency to zero fre-
quency
P3.1.2.11
0
1
1
608
0 = Disabled
1 = Enabled
P3.1.2.12
Energy optimization
0
1
0
666
The drive searches for the mini-
mum motor current in order to
save energy and to lower the
motor noise. This function can
be used e.g. in fan and pump
applications
0 = Disabled
1 = Enabled
P3.1.2.13
50.0
150.0
%
100.0
659
Parameter for adjusting the sta-
tor voltage in permanent mag-
net motors.
P3.1.2.14
Overmodulation
0
1
1
Maximizes drive output voltage,
but increases motor current
harmonics.
0= Disabled
1= Enabled
Table 60. Motor control
Code
Parameter
Min
Max
Unit
Default
ID
Description







































































