

























- 10 -
2. Electric Rotary Table /LER Series
2
.
1 LER Series( Basic
・
External stopper
)
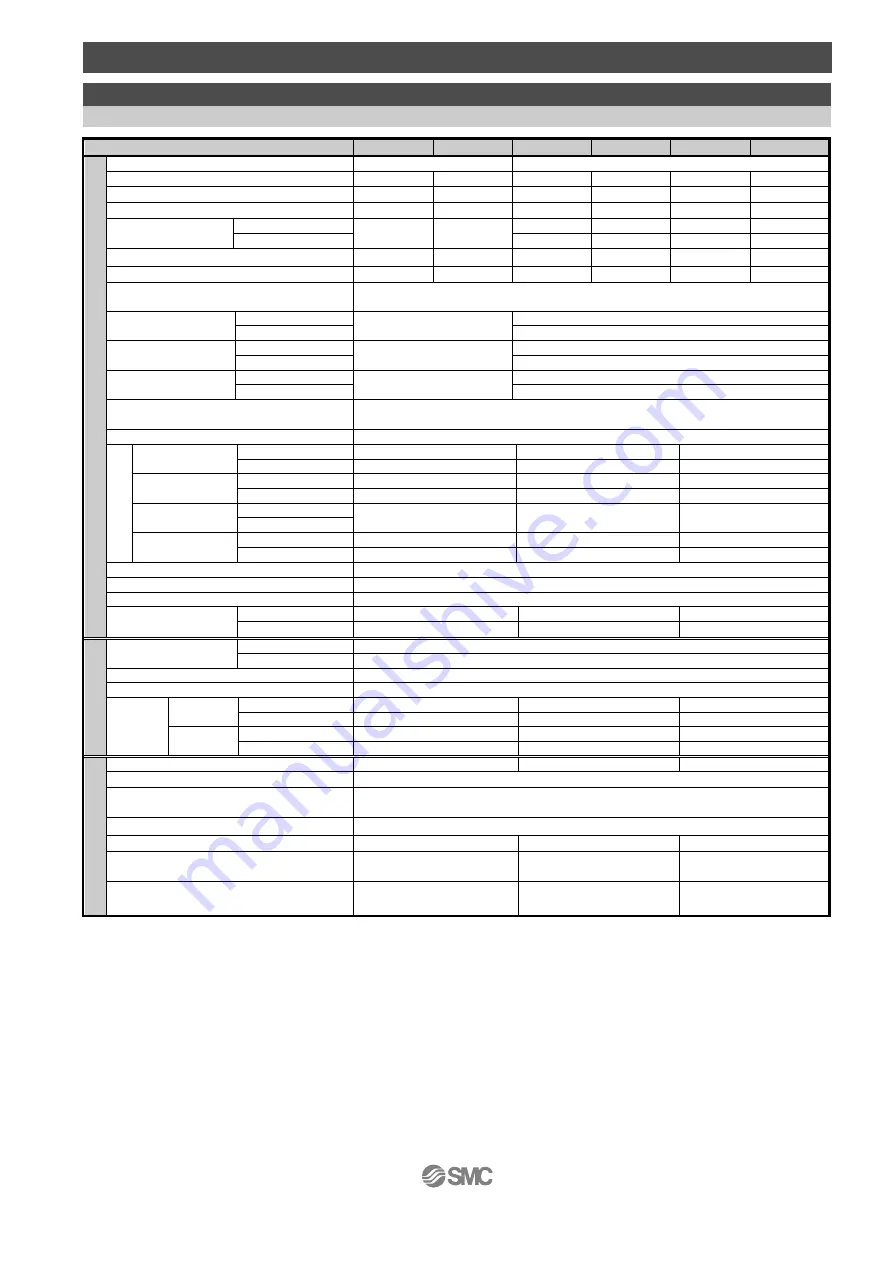
2.1.1 Specification
Model
LER*10K
LER*10J
LER*30K
LER*30J
LER*50K
LER*50J
A
c
tu
a
to
r
s
p
e
c
if
ic
a
ti
o
n
/
B
a
s
ic
Rotation Angle (°)
310
320
Gear rate(°)
8
12
8
12
7.5
12
Max. Rotation Torque(N
・
m)
0.32
0.22
1.2
0.8
10.0
6.6
Pushing Torque 40
~
50%(N
・
m)
Note 1) Note 3)
0.13
~
0.16
0.09
~
0.11
0.48
~
0.60
0.32
~
0.40
4.0
~
5.0
2.6
~
3.3
Max. Moment of
Inertia(kg
・
m
2
)
Note 2)
LECP6/1/MJ/JXC9
0.004
0.0018
0.035
0.015
0.13
0.05
LECPA
0.027
0.012
0.10
0.04
Rotation Speed(°/sec)
Note 2) Note 3)
20to280
30to420
20to280
30to420
20to280
30to420
Pushing Speed(°/sec)
20
30
20
30
20
30
Angular acceleration/
Angular deceleration(°/sec
2
)
Note 2)
3,000
Backlash(°)
Basic
± 0.3
± 0.2
High precision
± 0.1
Repeatability (°)
Basic
± 0.05
± 0.05
High precision
± 0.03
Lost motion (°)
Note 4)
Basic
0.3 or less
0.3 or less
High precision
0.2 or less
Impact resistance/vibration resistance
(m/sec
2
)
Note 5)
150/30
Actuation type
Worm gear and belt
T
a
b
le
a
llo
w
a
b
le
loa
d
Radial load
(N)
Basic
78
196
314
High precision
86
233
378
Thrust load
/Push(N)
Basic
78
363
451
High precision
107
398
517
Thrust load
/Pull(N)
Basic
74
197
296
High precision
Moment
(N
・
m)
Basic
2.4
5.3
9.7
High precision
2.9
6.4
12.0
Max. operating frequency(c.p.m)
60
Operating temperature range (
o
C)
5 to 40
Operating humidity range (%RH)
90 or less (No condensation)
Weight (kg)
Basic
0.49
1.1
2.2
High precision
0.52
1.2
2.4
E
x
te
rn
a
l
s
to
p
p
e
r
Rotation Angle (°)
(-2) with 1 Arm
180
(-3) with 2 Arms
90
Repeatability at the end (°)
±0.01
Range of external stopper(°)
±2
Weight
(kg)
(-2) with 1
Arm
Basic
0.55
1.2
2.5
High precision
0.61
1.4
2.7
(-3) with 2
Arms
Basic
0.57
1.2
2.6
High precision
0.63
1.4
2.8
E
le
c
tr
ic
s
p
e
c
if
ic
a
ti
o
n
Motor size
□20
□28
□42
Motor
Step motor (Servo 24VDC)
Encoder
(Angular displacement sensor)
Incremental A/B phase (800 pulse/rotation)
Rated voltage(VDC)
24 ± 10%
Power consumption(W)
Note 6)
11
22
34
Standby power consumption when
operating(W)
Note 7)
7
12
13
Max.instantaneous
power consumption(W)
Note 8)
19
42
57
Note 1) Pushing Torque accuracy should be ±30%(F.S.) for LER10, ±25%(F.S.) for LER30, ±20%(F.S.) for LER50.
Note 2) The Angular acceleration, angular deceleration and angular speed may fluctuate due to variations in the moment of inertia.
Refer to the catalog.
Note 3) The speed and force may change depending on the cable length, load and mounting conditions.Furthemore, if the cable length
exceeds 5m then it will decrease by up to 10% for each 5m.(At 15m : Reduced by up to 20%)
Note 4) A reference value for correcting an error in reciprocal operation.
Note 5) Impact resistance: No malfunction occured when the rotary actuator was tested with a drop tester in both an axial direction and a
perpendicular direction to the lead screw. (The test was performed with the rotary actuator in the initial state)
Vibration resistance: No malfunction occured in a test ranging between 45 to 2000 Hz. Test was performed in both an axial direction
and a perpendicular direction to the lead screw.
(The test was performed with the rotary actuator in the initial state)
Note 6) The
“Power consumption” (including the controller) is for when the actuator is operating.
Note 7) The
“Standby power consumption when operating” (including the controller) is for when the actuator is stopped in the set
position during the operation, except for during the pushing operation.
Note 8) The
“Momentary max.power consumption” (including the controller) is for when the actuator is operating.
This value can be used for the selection of the power supply.
Summary of Contents for LER Series
Page 3: ... 2 7 Troubleshooting 42 ...