





























-42-
No. JXC
※
-OMY0008
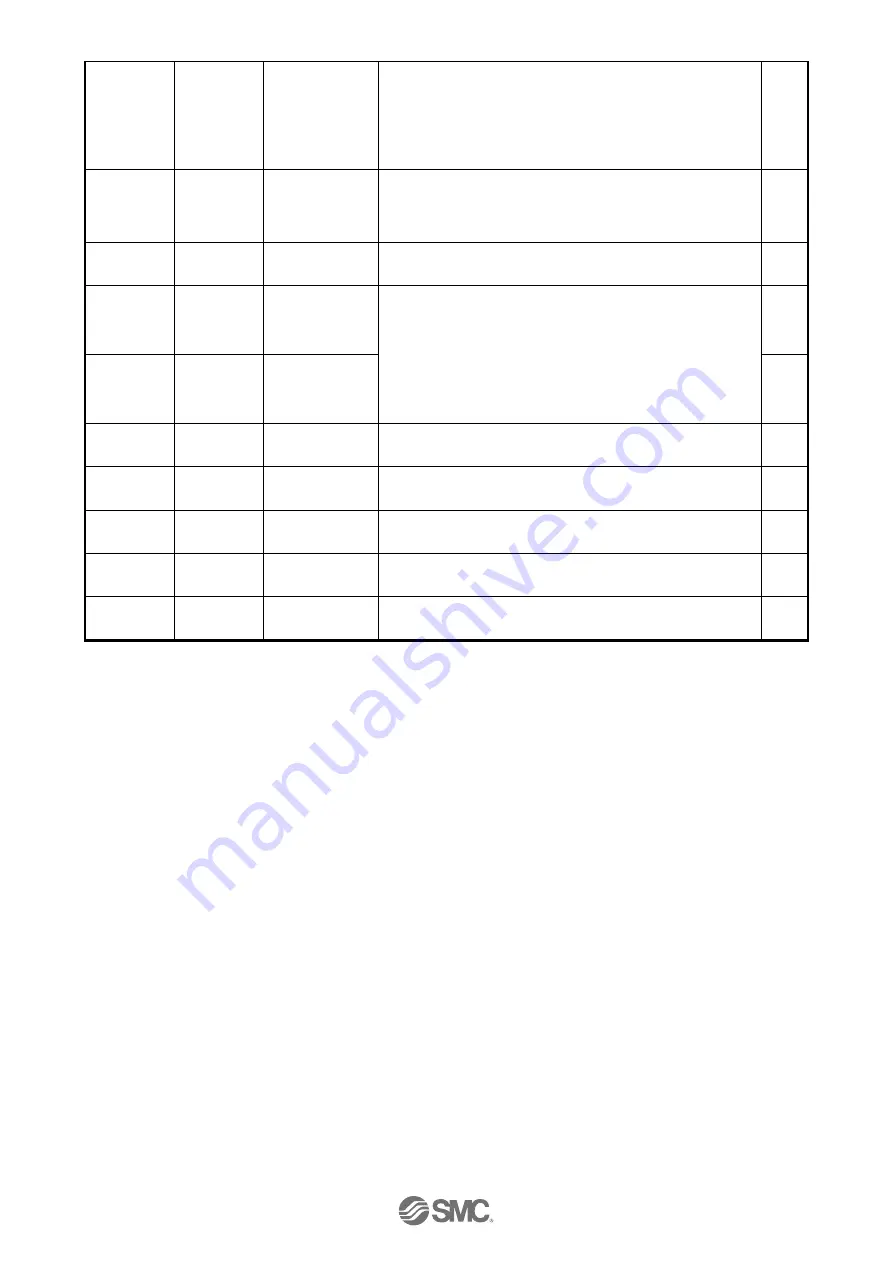
Para protect Para protect 1 to 2
Sets the range in which parameter and step data can be
changed.
1. Basic par Step data (Basic par Return to
origin par Step data)
2. Basic parameter (Basic par Return to origin
parameter)
■
Enable SW
Enable SW
1 to 2
This defines the status of the Enable switch of the teaching
box.
1. Enabled
2. Disabled
■
Unit name
Unit name
Fixed value
Indication of actuator type compatible with the controller.
(Do not change the setting)
-
W-AREA1
W-AREA1
Basic parameter
"Stroke (-)" -
"Stroke (+)"
This is the setting to define the conditions where the
“W-AREA” signal will turn ON. [Unit: mm]
If the current position is within the range between the
W-AREA1 and W-AREA2, “WAREA” will turn ON.
∗
If W-AREA1 >W-AREA2, the "Parameter ALM" alarm will be
activated. However if W-AREA1= W-AREA2 = 0, “WAREA”
will be OFF and no alarm will be generated.
■
W-AREA2
W-AREA2
Basic parameter
"Stroke (-)" -
"Stroke (+)"
■
ORG
Correct
Link Offset
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
-
Sensor type
Sensor type
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
-
Option 1
Option 1
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
○
Undefine
No. 11
Undefine
No. 11
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
○
Undefine
No. 12
Undefine
No. 12
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
-
∗
1 The range varies depending on the actuator. Please refer to the manual of the actuator for more
details.







































































