





























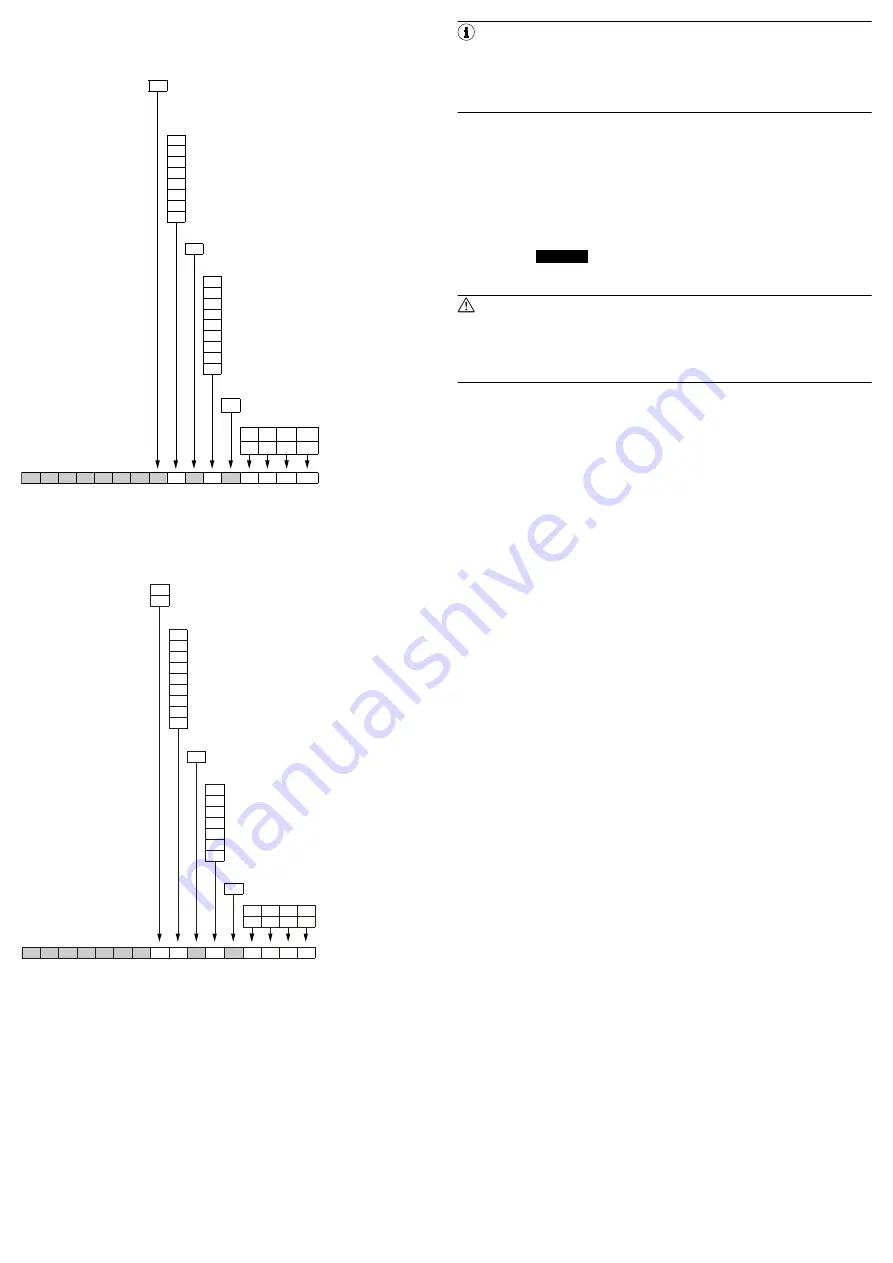
3.1 Clave de tipos
Eje macizo
Tipo
S Eje macizo
Características mecánicas
1
Brida servo, rosca M4, eje macizo Ø 6 x 10 mm con superficie
D
Brida servo, rosca M4, eje macizo Ø 6 x 10 mm con muelle de ajuste
F
Brida servo, rosca M3, eje macizo Ø 6 x 10 mm con superficie
G
Brida servo, rosca M3, eje macizo Ø 6 x 10 mm con muelle de ajuste
4
Brida clamping, rosca M4, eje macizo Ø 10 × 19 mm con superficie
E
Brida clamping, rosca M4, eje macizo Ø 10 × 19 mm con muelle de ajuste
H
Brida clamping, rosca M3, eje macizo Ø 10 × 19 mm con superficie
J
Brida clamping, rosca M3, eje macizo Ø 10 × 19 mm con muelle de ajuste
Interfaces eléctricas
O 4,5… 32 V, SIN/COS
Tipo de conexión
Resolución
A Conector macho M23 de 12 polos radial
B Conector macho M23 de 12 polos axial
C Conector macho M12 de 8 polos, radial
D Conector macho M12 de 8 polos, axial
J Cable de 8 hilos, universal 0,5 m
1)
K Cable de 8 hilos, universal 1,5 m
1)
L Cable de 8 hilos, universal 3 m
1)
M Cable de 8 hilos, universal 5 m
1)
N Cable de 8 hilos, universal 10 m
1)
Periodos por revolución
1
0
2
4
0
S
0
1
Par de apoyo,
largo (solo con los tipos B, T)
Resolución 1.024 periodos
D
F
S
6
0
S
-
S
O
0
1) La salida de cable universal está ubicada de forma que el cable se
puede colocar tanto en sentido radial como axial sin doblarlo. Homo‐
logación UL no disponible.
Eje hueco
Tipo
B Eje hueco de inserción
T Eje hueco pasante
Características mecánicas
A Eje hueco de Ø 6 mm con ranura para el muelle de ajuste
B Eje hueco de Ø 8 mm con ranura para el muelle de ajuste
C Eje hueco de Ø 3/8" con ranura para el muelle de ajuste
D Eje hueco de Ø 10 mm con ranura para el muelle de ajuste
E Eje hueco de Ø 12 mm con ranura para el muelle de ajuste
F Eje hueco de Ø 1/2" con ranura para el muelle de ajuste
G Eje hueco de Ø 14 mm con ranura para el muelle de ajuste
H Eje hueco de Ø 15 mm con ranura para el muelle de ajuste
J Eje hueco de Ø 5/8" con ranura para el muelle de ajuste
Interfaces eléctricas
O 4,5… 32 V, SIN/COS
Tipo de conexión
Resolución
A Conector macho M23 de 12 polos radial
C Conector macho M12 de 8 polos, radial
J Cable de 8 hilos, universal 0,5 m
1)
K Cable de 8 hilos, universal 1,5 m
1)
L Cable de 8 hilos, universal 3 m
1)
M Cable de 8 hilos, universal 5 m
1)
N Cable de 8 hilos, universal 10 m
1)
Periodos por revolución
1
0
2
4
0
S
0
1
Resolución 1.024 periodos
Par de apoyo,
largo (solo con los tipos B, T)
D
F
S
6
0
S
-
0
0
0
1) La salida de cable universal está ubicada de forma que el cable se
puede colocar tanto en sentido radial como axial sin doblarlo. Homo‐
logación UL no disponible.
4
Planificación del proyecto
4.1 Requisitos de la evaluación de señales
Para determinar la velocidad con el signo correcto y la posición incremental
correcta, debe evaluarse tanto la señal senoidal como la cosenoidal. Esto debe
realizarse mediante una arquitectura de seguridad adecuada. Normalmente la
evaluación de la señal se realiza en dos canales aislados cuyos resultados se
comparan entre sí durante el tiempo de seguridad del proceso
35
La magnitud de
la desviación permitida debe seleccionarse de modo que en el proceso de eva‐
luación puedan detectarse los errores estáticos.
35
Tiempo de seguridad del proceso: lapso de tiempo entre la aparición de un
fallo peligroso del sistema de medición y el momento en el que debe haber
concluido la respuesta para evitar la aparición del peligro.
INDICACIÓN
Las desviaciones pueden deberse a:
•
Tolerancias de acoplamiento en los umbrales de conmutación:
± 1 incremento
•
Tolerancias de acoplamiento de los momentos de exploración: número
de incrementos en diferencia de tiempo a máxima velocidad
Para evaluar las señales deben utilizarse siempre las señales diferenciales
(véase
De las señales diferenciales deben formarse señales de onda cuadrada con ele‐
mentos de conmutación adecuados (p. ej., comparadores) que se utilizan con el
método adecuado (p. ej., decodificador de cuadratura) para llevar a cabo un
recuento.
Los umbrales de conmutación deben seleccionarse de modo que no se sobre‐
pase el límite inferior de la monitorización de la longitud vectorial (véase
). Por consiguiente, el umbral de conmutación superior (con toleran‐
cia incluida) debe encontrarse a un máximo de 150 mV por encima del centro de
la señal (véase
), y el umbral de conmutación inferior (con tolerancia
incluida) debe encontrarse a un máximo de 150 mV por debajo del centro de la
señal.
ADVERTENCIA
Si las dimensiones de los umbrales de conmutación y de la histéresis son
inapropiadas, al evaluarse las señales pueden producirse detecciones
erróneas de flancos adicionales o no detecciones erróneas de flancos. Esto
puede dar lugar a que se produzcan, p. ej., errores al determinar el sentido
de giro, la posición o la velocidad.
Mediante los contadores puede alcanzarse una resolución de 4.096 pasos por
revolución (es decir, 4 pasos por periodo de señal o 1 paso por cuadrante en
cada periodo de señal).
La cobertura de diagnóstico (CC) para la detección de errores de las señales del
encoder debe ser al menos del 99 %. A este respecto, deben cumplirse los requi‐
sitos de diagnóstico que se especifican en
. El diagnóstico debe reali‐
zarse durante el tiempo de seguridad del proceso
36
4.2 Requisitos de diagnóstico y detección de errores
El sistema de evaluación postconectado debe garantizar, según IEC 61800-5-2,
basándose en los supuestos de errores para el uso de motion and position feed‐
back sensors allí listados, los requisitos de diagnóstico y detección de errores
descritos a continuación.
En caso de que se detecte un error en uno de los diagnósticos abajo menciona‐
dos, debe introducirse una respuesta al error que ponga la aplicación en un
estado seguro.
En caso de error, debe alcanzarse el estado seguro de la aplicación antes de que
pueda surgir una situación peligrosa. Por consiguiente, la suma del tiempo
máximo necesario para detectar el error y el tiempo para la respuesta al error
debe ser menor que el tiempo de seguridad del proceso
36
El tiempo máximo necesario para detectar el error es el intervalo de tiempo con el
que las medidas de diagnóstico abajo mencionadas se repiten por completo.
4.2.1
Fallos de las señales analógicas de encoder de seno y coseno
Para detectar cualquier cambio de nivel no permitido en la relación entre seno y
coseno se utiliza la fórmula matemática de las señales seno y coseno que sirve
de base.
Usando la siguiente fórmula matemática para el valor de
k
k² = k
1
² × sin²
α
+ k
2
² × cos²
α
u otro proceso matemático adecuado que permita registrar el nivel de tensión
continua común de las señales seno/coseno. La comparación con los límites
máximos y mínimos apropiados permite una detección precisa y rápida de las
desviaciones no permitidas, independientemente de la posición angular
momentánea
α
.
Con las señales existentes,
k
puede determinarse con la ayuda del cálculo
siguiente:
k² = (SIN+ – SIN–)² + (COS+ – COS–)²
Esta relación de las señales útiles puede representarse con claridad mediante un
modelo bidimensional (diagrama de Lissajous). Las señales útiles forman aquí un
anillo de señal útil.
Para la señal
k
se permite una tolerancia de ± 50 % en relación a la situación
nominal. Una desviación superior a esta supone la vulneración de los límites de
las longitudes vectoriales y exige una respuesta al error apropiada del sistema de
evaluación.
Se recomienda no ajustar demasiado los valores límite para evitar falsas alar‐
mas.
4.2.2
Pérdida del acoplamiento mecánico de la carcasa del encoder o des‐
viación del acoplamiento mecánico durante la parada o el funciona‐
miento
Este supuesto de error puede excluirse según IEC 61 800-5-2 montando correcta‐
mente el par de apoyo o la brida clamping/servo (véase
4.2.3
Pérdida del acoplamiento mecánico entre el eje del encoder y el eje del
accionamiento durante la parada o el funcionamiento
Este supuesto de error puede excluirse según IEC 61 800-5-2 montando correcta‐
mente el encoder en el eje del accionamiento (véase
36
Tiempo de seguridad del proceso: lapso de tiempo entre la aparición de un
fallo peligroso del sistema de medición y el momento en el que debe haber
concluido la respuesta para evitar la aparición del peligro.
8016866/12N8/2019-01-31/de, en, es, fr, it
DFS60S Pro | SICK
16





















































