





























Maintenance and repair of the
eBee RTK
9.3 Full airframe and sensor inspection
Beyond the general airframe inspection that is performed before every flight, we
recommend that you perform a full airframe and sensor inspection regularly to
keep your drone in good operating condition.
Caution:
The autopilot, sensors and actuators within the Central
Body of the
eBee RTK
are specially calibrated and should only be
modified by your
eBee RTK
reseller. Opening the Central Body of the
eBee RTK
will void the warranty.
The inspection includes the following checks:
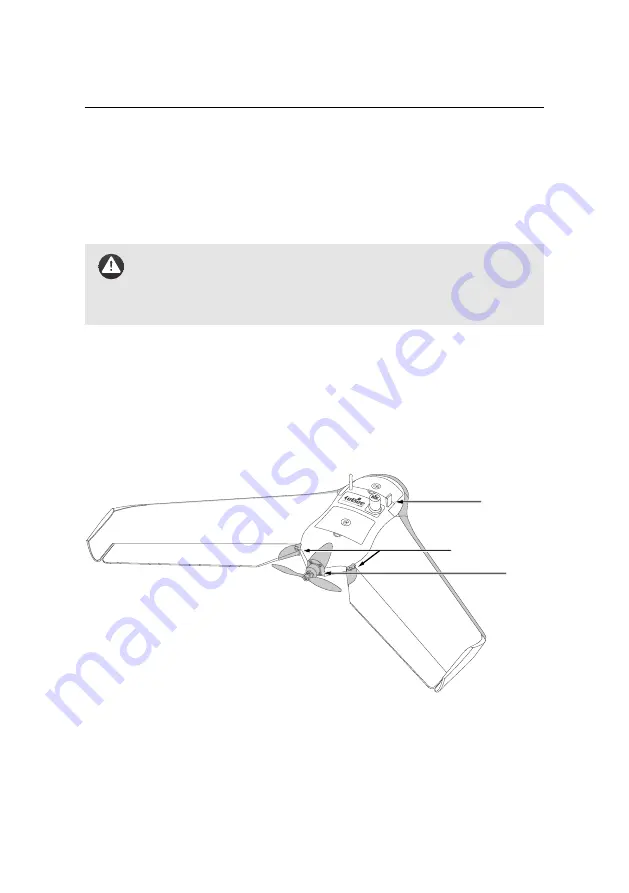
Check 1: Motor and Servos
The
eBee RTK
uses a brushless DC motor to turn its propeller and generate thrust.
The servos are the two actuators connected through a servo connection mech-
anism to both ailerons. Damaged actuators can prevent the drone from flying
correctly and thus it is important to ensure their proper functioning.
servo connection
pitot probe
motor
mechanisms
To check the actuators, follow these steps:
1. The motor must be clean and spin smoothly without friction to function
151
Summary of Contents for EBEE RTK
Page 1: ...Extended User Manual eBee RTK Revision 3 December 2014 Copyright 2010 2015 senseFly Ltd ...
Page 14: ......
Page 71: ...Part II Advanced functionalities ...
Page 147: ...Part III Maintenance Repair and Troubleshooting ...
Page 182: ......
Page 183: ...Part IV Specifications ...





































































