





























87
–100~0~100%
08. 57
08
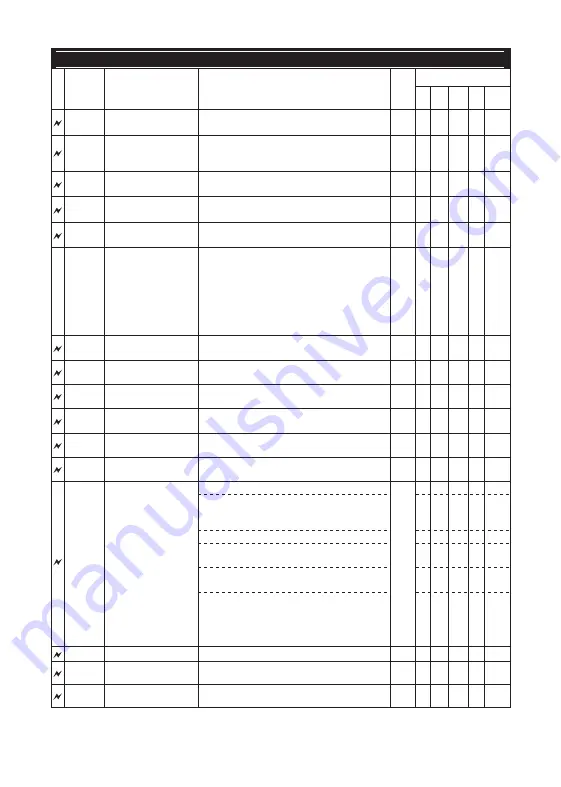
Application function 1 parameters
Control Method
Setting Range
V/f
Wit-
hout
PG
PG
V/f
PG
Para-
meter
Parameter
Functions
Fact-
ory
Defa-
ult
Torque
control
×
○ ○
○
○
PID control Dancer
reference position
0
○ ○ ○
○
×
0
○ ○ ○
○
×
PID control block
selection
0: invalid PID constant switching;
1 ~ 100%: manual set value
08. 58
PID control Detection
width of dancer
position deviation
0
○ ○ ○
○
×
0.000~30.000 times
08. 59
PID control P term
(gain) 2
0.100
○ ○ ○
○
×
0.0~3600.0s
08. 60
PID control I item
(integral time) 2
0.0
○ ○ ○
○
×
0.00~600.00s
08. 61
PID control item D
(differential time) 2
0.00
○ ○ ○
○
×
08. 62
0~3
Bit 0: PID output polarity; 0 = plus(add); 1 =
minus(subtract)
Bit 1: Select compensation factor for PID
output
0 = Ratio (relative to the main setting)
1 = Speed command (relative to maximum
frequency)
×
100
○ ○ ○
○
08. 68
0~300%
Brake signal Brake-
OFF current
×
×
×
1.0
○
○
08. 69
0.0~25.0Hz
Brake signal Brake-
OFF frequency/speed
×
1.0
○ ○ ○
○
08. 70
0.0~5.0s
Brake signal Brake-
OFF timer
×
×
×
1.0
○
○
08. 71
0.0~25.0Hz
Brake signal Brake-
ON frequency/speed
×
×
×
×
0.10
○
08. 97
0.00~10.00 times
Servo-lock gain
×
×
×
×
0.100
○
08. 98
0.000~1.000s
Servo-lock Completion
timer
×
×
×
×
10
○
08. 99
0~9999 pulse
Servo-lock Completion
pulse range
×
1.0
○ ○ ○
○
08. 72
0.0~5.0s
Brake signal Brake-
ON timer
×
×
×
100
0
○ ○
×
×
×
○ ○
×
×
×
○ ○
×
×
×
○ ○
×
○
○
○
○
×
× × ×
×
08. 95
0~300%
Brake signal Brake-
ON torque
08. 96
0~31
Bit 0: Criterion speed for brake-ON
( 0: speed detection value 1: reference
speed)
Bit 1: Reserved
Bit 2: Response for brake-OFF current ( 0 :
Slow response 1 : Quick response )
Bit 3: Criterion frequency for brake-ON ( 0 :
Stop frequency 1 : Brake-ON frequency )
Bit 4: Output condition of brake signal (0:
operation command OFF is invalid,
Independent of a run command ON/OFF)
1: operation command OFF is valid, Only
when a run command is OFF
Brake signal Speed
condition selection







































































