





























47
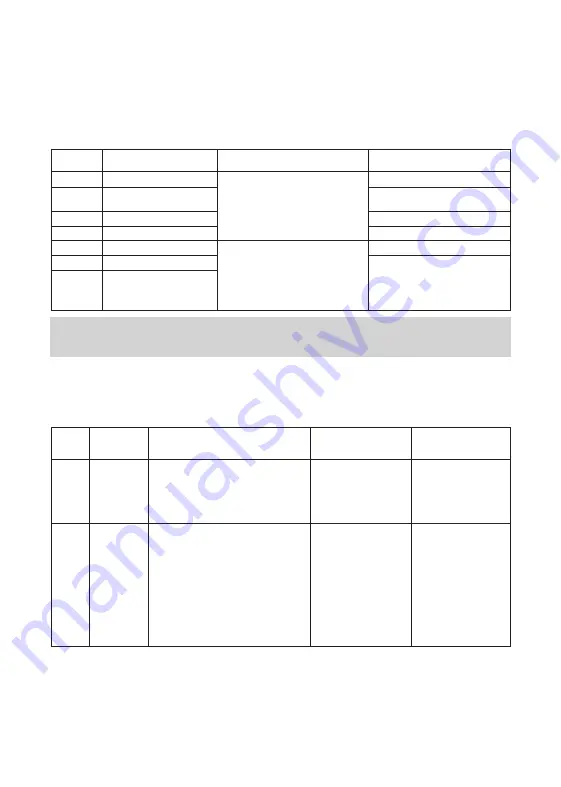
4.1.3 Function parameters basic Settings and auto-tuning <1> of V/f Control /
Common Dynamic Torque Vector Control
Function
parameter
Function
Data
Factory default
Base frequency 1
Deceleration time 1
Motor 1
(
Rated capacity)
Motor 1 (Rated current)
Max. output frequency 1
Acceleration time 1
Motor ratings (printed on the
nameplate of the motor)
50Hz
Below 22kW: 6.00s
Above 30kW: 20.00s
Note: When configuring the function parameter03
.
02, take into account that changing the data
automatically updates the data of the function parameters 03
.
03, 03
.
06~03
.
23, 03
.
53~03, 56
and 04
.
46.
Auto-tuning procedure
(1) Selection of auto-tuning type
Select “tuning with the motor stopped (03
.
04* = 1)” or “tuning with the motor running (03
.
04* = 2)”.
For the latter tuning, set appropriate acceleration and deceleration (00
.
07, 00
.
08) times. and
specify the rotation direction that matches the actual rotation direction of the machinery.
When under “V/f control (00
.
42 = 0
、
2)” or “Common Dynamic Torque Vector Control (00
.
42 = 1)”,it is
adopted to drive general motor and the wiring between the motor and inverter is too long or reactor is
connected, it requires configuring the basic function parameters or implement auto-tuning for motor
controlling before starting operation. set the function parameters data in the following table according
to the motor ratings on the motor's nameplate.
50Hz
Rated voltage at base
frequency 1
Nominal applied motor capacity
Rated current of nominal applied motor
380V
Machinery design values
Note: For a test-driving of the motor,
increase values so that they are longer
than your machinery design values. If
the specified time is short, the inverter
may not run the motor properly
00
.
04 *
00
.
08 *
00
.
05 *
03
.
02 *
03
.
03 *
00
.
03 *
00
.
07
Auto-
Tuning type
Tune while
the motor
stops
Tune while
the motor
is rotating
under V/f
control
Tuning with the
motor stopped
Motor parameters subjected
to tuning
Primary resistance %R1 (03
.
07*)
Leakage reactance %X (03
.
08*)
Rated Slip (03
.
12*)
% X correction factor 1
(03
.
53, 03
.
54)
No-load current (03
.
06 *)
Primary resistance% R1 (03
.
07 *)
Leakage reactance% X (03
.
08 *)
Rated Slip frequency (03
.
12 *)
Magnetic saturation factors 1 – 5
Magnetic saturation expansion
factors a ~ c (03
.
16 * ~ 03
.
23 *)
% X correction factor 1, 2
(03
.
53 * 03
.
54 *)
Tuning Action
Select under the
following conditions
Cannot rotate
the motor
1
2
03
.
04
Data
Tuning the %R1 and
%X, with the motor
stopped.Tuning the
no-load current and
magnetic saturation
factor, with the motor
running at 50% of the
base frequency. Tuning
the rated slip frequency,
with the motor stopped.
Under no-load status
(motor idling, not
connect to the
mechanical
transmission part)
Tuning with load
applied decreases the
tuning accuracy.







































































