





























Chapter 5 Function parameter
57
Ch
ap
ter 5
be used as the offset of set value, the overlay of the offset frequency and F0.20 is used as the set
value of the final upper limit frequency.
F0.23
Lower limit frequency
0.00Hz
~
F0.21(Lower limit frequency)
0.00Hz
☆
When the frequency command is lower than the lower limit frequency set by F0.23, the
inverter can shut down, and then run at the lower limit frequency or the zero speed, the running
mode can be set by F7.18.
F0.24
Running direction
Same direction
0
0
☆
Opposite direction
1
By changing the parameters, the motor steering can be achieved without changing the
motor wiring, which acts as the adjustment of any two lines(U, V, W) of the motor to achieve
the conversion of the motor rotation direction.
Tip: After the parameter is initialized, the motor running direction will be restored to its
original status. When the system debugging is completed, please use with caution where the
change of motor steering is strictly prohibited.
F0.26
AI analog accuracy
0.01Hz
0
1
☆
0.05Hz
1
0.1Hz
2
0.5Hz
3
AI Analog input frequency corresponding to the resolution.
F0.27
Inverter type
G type (Constant torque load type)
1
-
●
The parameters is only for user to view the factory model and can not be changed.
1: Suitable for constant torque load
5-2-3.F1 group Input terminals
PI160 series inverter is equipped with 7 multi-function digital input terminals(of which DI5
can be used as a high-speed pulse input terminal)
,
and 1 analog input terminals.
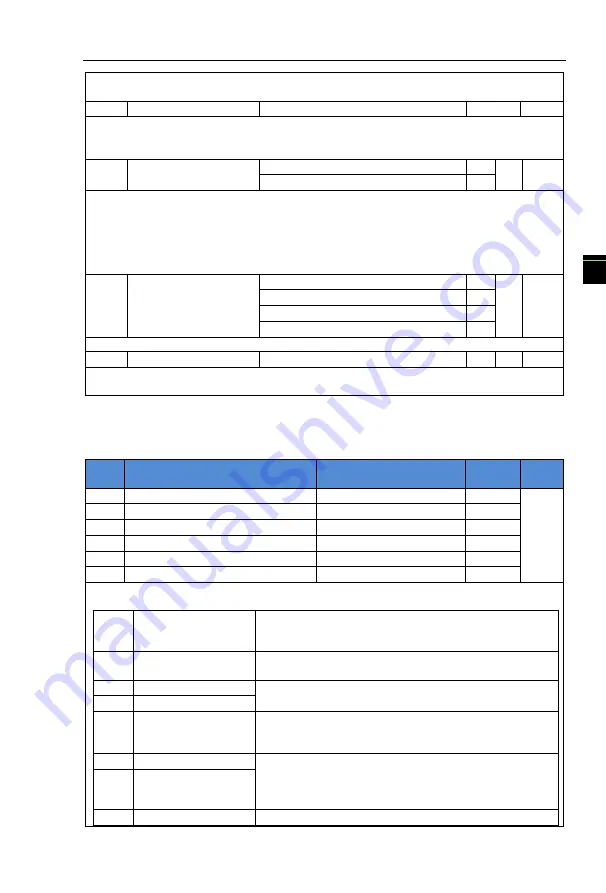
Code
Parameter name
Setting range
Factory
setting
Change
Limit
F1.00 DI1 terminal function selection
0
~
53
1
★
F1.01 DI2 terminal function selection
0
~
53
2
F1.02 DI3 terminal function selection
0
~
53
8
F1.03 DI4 terminal function selection
0
~
53
9
F1.04 DI5 terminal function selection
0
~
53
12
F1.05 DI6 terminal function selection
0
~
53
13
These parameters are used to set the digital multi-function input terminal, the optional
functions are shown in the following table:
Set
value
Function
Description
0
No function
The terminal for not use can be set to "no function" to
prevent accidental operation.
1
Forward run (FWD)
External terminals are used to control the FWD/REV run
mode of inverter.
2
Reverse run (REV)
3
Three-wire operation
control
This terminal is used to determine the inverter's three-wire
control mode. For details, please refer to the instructions of
function code F1.10 ("terminal command mode).
4
Forward JOG(FJOG)
FJOG means Forward JOG running, RJOG means
Reverse JOG running. For Jog running frequency and Jog
Ac/deceleration time, please refer to the description of the
function code F7.00, F7.01,F7.02.
5
Reverse JOG(RJOG)
6
Terminal UP
Modify frequency increment/decrement command when







































































