





























Function description
Operating Manual PMCprotego S2-2(-C)
1002529-EN-04
23
}
The method by which the servo amplifier receives the command for controlled braking
of the motor is defined in the Configurator:
–
Drive-activated:
After the safety function is triggered, the safety card issues a com-
mand to the servo amplifier for controlled braking of the motor. The braking ramp is
configured in the Configurator.
–
Controller-activated:
After the safety function is triggered, the control system is-
sues a command to the servo amplifier for controlled braking of the motor. The
braking ramp must only be configured in the Configurator if monitoring of the brak-
ing ramp is also activate there.
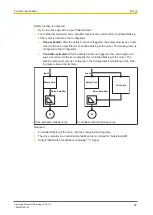
Safety Card
Servo Amplifier
M
Input
v
t
Drive-activated braking ramp
Safety Card
Servo Amplifier
Controller
M
Input
v
t
Controller-activated braking ramp
Reaction
}
Controlled braking of the drive, with the configured braking ramp.
}
When the STO delay time has elapsed, the safety card activates the safety function
"safe torque off" (STO). The motor becomes torque-free.
}
"STO Acknowledge" output: “1” Signal
If any external forces influence the motor axis (e.g. suspended loads), additional measures
(e.g. a safety holding brake) are required in order to eliminate hazards.





















































