





























6 Installation
C-863 Mercury Controller
MS205Equ
Version: 2.0.0
33
INFORMATION
If the \PI\GCSTranslator directory is not present on your PC:
For an executable file (.exe) to be able to access a stage database, both files have to
be in the same directory.
Installing a custom stage database on Linux
1. Log onto the PC as a superuser (root rights).
2. Copy the stage database file to the /usr/local/PI/pi_gcs_translator/ directory.
6.2 Mounting the C-863
The C-863 can be used as bench-top device or mounted in any orientation on a
surface.
INFORMATION
The C-863 is stackable and can be installed in a control cabinet.
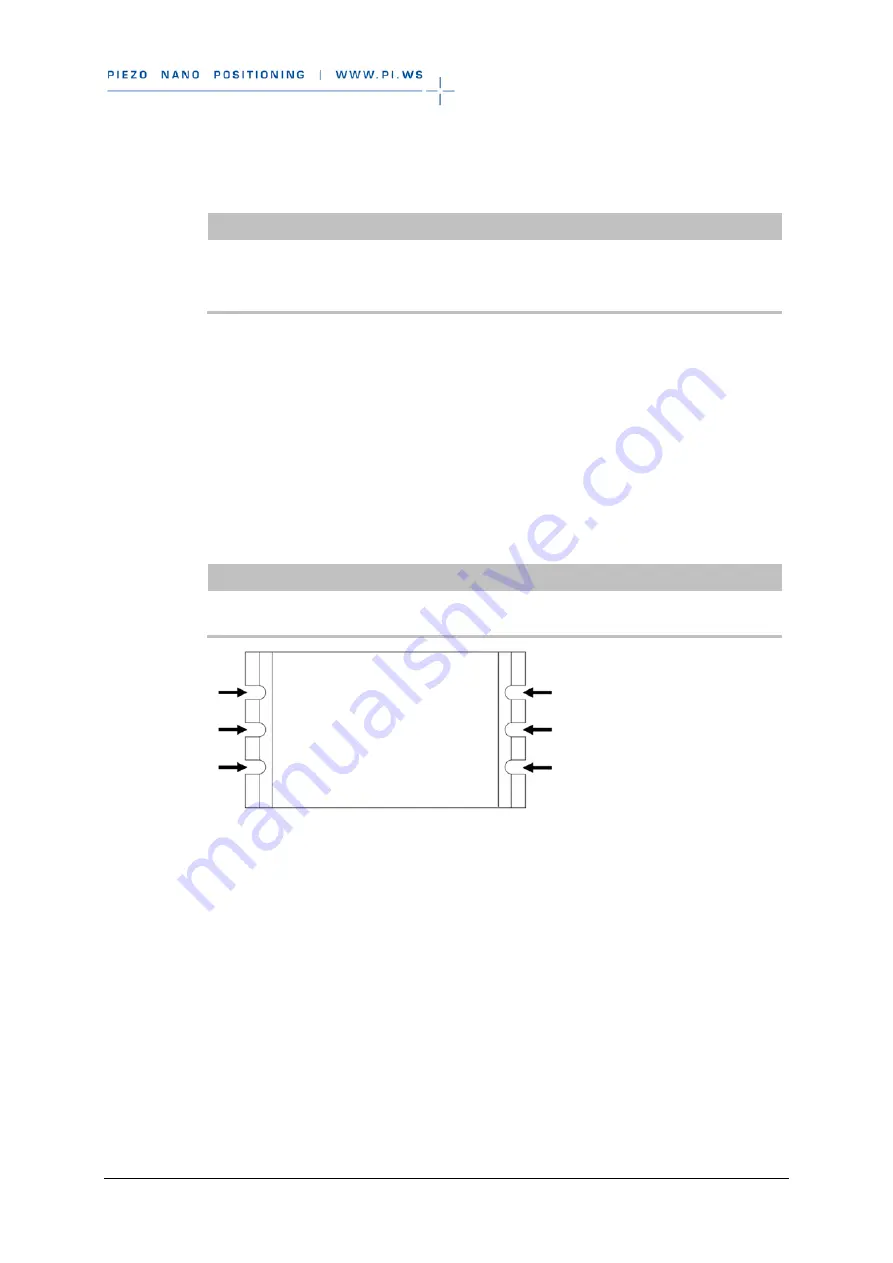
Figure 6: C-863.11: Mounting strips with recesses (see arrows)
Tools and accessories
Appropriate screws; see dimensional drawing (p. 96).
Suitable screwdriver
Mounting the C-863 on a surface
1. Make the necessary holes in the surface.
The arrangement of the recesses in the mounting strips of the C-863 can be
found in the dimensional drawing (p. 96).
2. Mount the C-863 to the recesses in the mounting strips with two suitable
screws each per side (see figure).







































































