


























Technical Manual PD4-E-M (EtherCAT)
3 Technical details and pin assignment
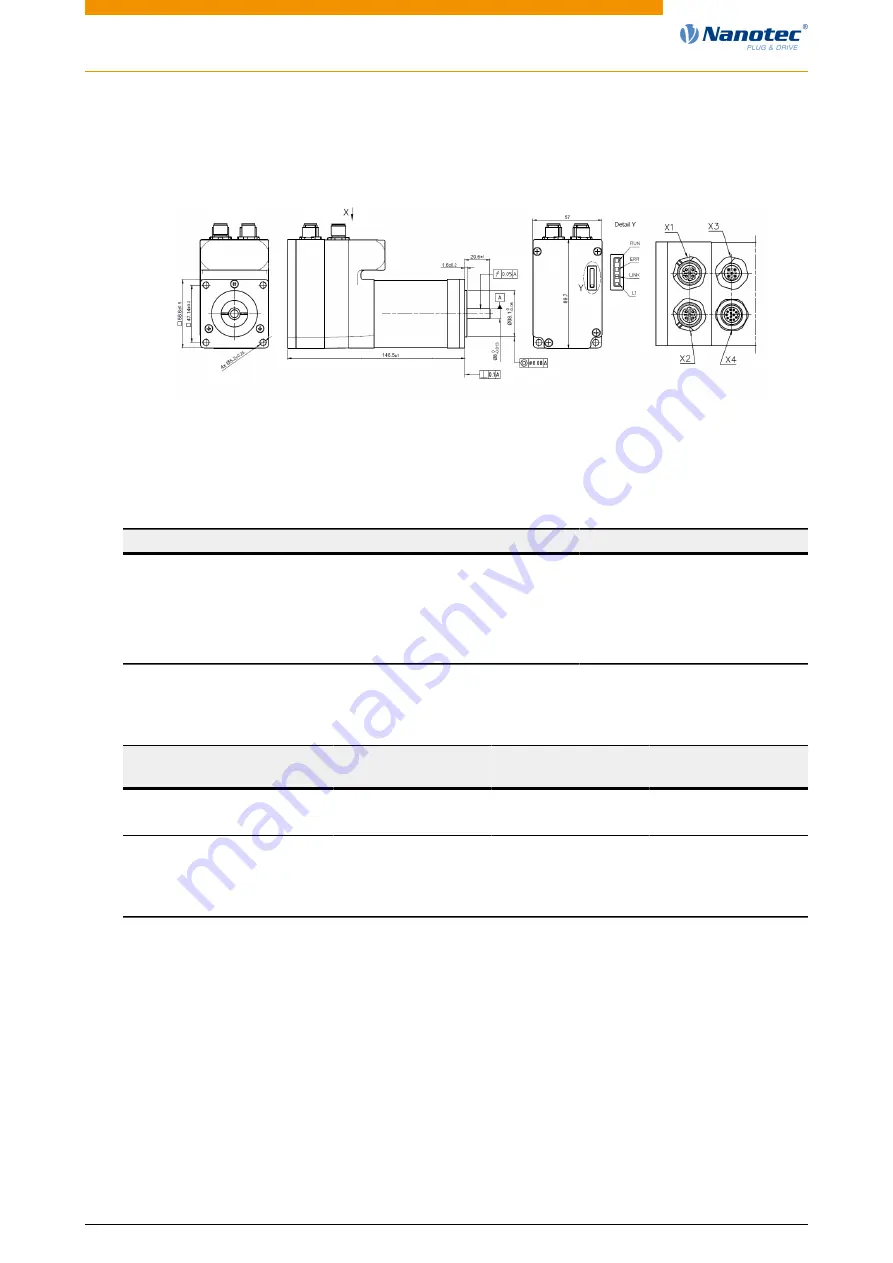
3.2.2 PD4-EB59CD-M-65-1
Front view and mounting
Side view
Rear view
View X
3.3 Electrical properties and technical data
3.3.1 Technical data – motor
PD4-E
PD4-EB
Type
High-pole DC servo (stepper
motor)
Low-pole DC servo (BLDC)
Operating voltage
12 - 48 V DC ±5%
12 - 48 V DC ±5%
Phase current rms
4.2 A
6 A
Peak current rms for 1 s
N/A
max. 18 A
3.3.2 Motor performance data
Type
Holding torque Ncm
Rated / peak torque
Ncm
Rated sped (rpm)
PD4-E591L42
187
N/A
N/A
PD4-EB59CD
N/A
60 / 180
3500
3.3.3 Technical data
Operating modes
Profile Position Mode, Profile Velocity Mode, Profile Torque Mode,
Velocity Mode, Homing Mode, Interpolated Position Mode, Cyclic
Sync Position Mode, Cyclic Sync Velocity Mode, Cyclic Synchronous
Torque Mode, Clock-Direction Mode
Set value setting /
programming
EtherCAT, analog input, NanoJ program
Inputs
6 digital inputs (+5 V/+24 V DC), individually switchable by means of
software, factory settings: 5 V
1 analog input 0–10 V or 0–20 mA (switchable by means of software)
Outputs
2 outputs, Open Drain, max. 100 mA
Version: 1.0.1 / FIR-v1748
12





















































